
ID : 5106
操作盤画面
メイン画面
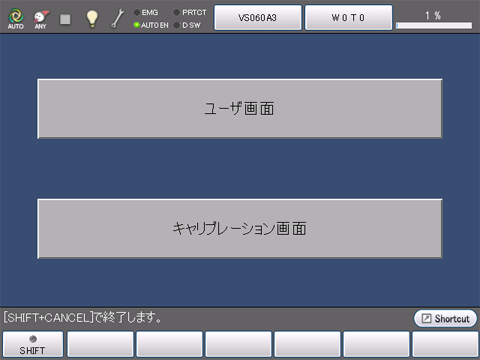
ロボットプログラム(TSR10.pcs)を起動させた後で、操作盤を起動します。
操作盤を起動すると下図のようなメイン画面が表示されます。
「キャリブレーション画面」を押すと、キャリブレーション用の画面に切替ります。
「ユーザ画面」を押すとユーザが作成した画面に切替ります。
キャリブレーション用画面
下記のキャリブレーション用画面を用意しています。3点教示式キャリブレーション作業に使用することができます。
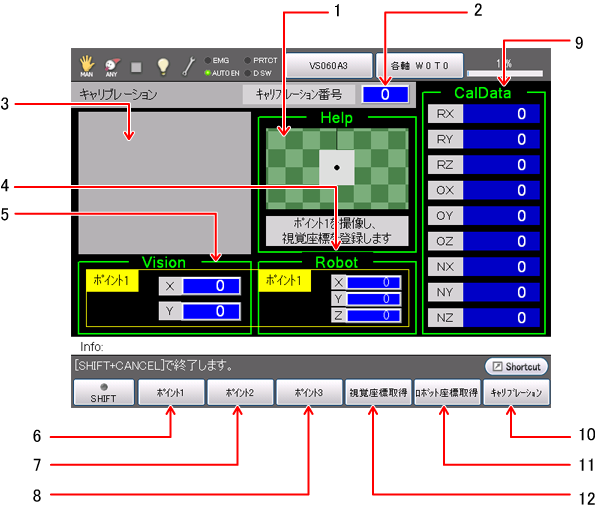
各ボタンの動作内容
各ボタンの動作内容について説明します。
| 1 | Help画面。次に行う操作の簡単な説明を表示します。 |
| 2 | キャリブレーション番号を設定します。キャリブレーションデータは31セット保存することができます。 |
| 3 | カメラで撮像した画像が表示されます。(コグネックス、パナソニックの場合表示可) |
| 4 | ポイント1~3のロボット座標を示します。 |
| 5 | ポイント1~3の視覚座標を示します。 |
| 6 | ポイント1の教示座標(ロボット、視覚)へ切替えます。 |
| 7 | ポイント2の教示座標(ロボット、視覚)へ切替えます。 |
| 8 | ポイント3の教示座標(ロボット、視覚)へ切替えます。 |
| 9 | キャリブレーション番号に登録されているキャリブレーションデータを表示します。 |
| 10 | キャリブレーションデータを計算します。 |
| 11 | ロボット座標を取得します。 |
| 12 | 視覚座標(マークの重心位置)を取得します。(対応視覚装置4社の場合使用可) |
SHIFTを押した時に表示されるメニューを説明します。
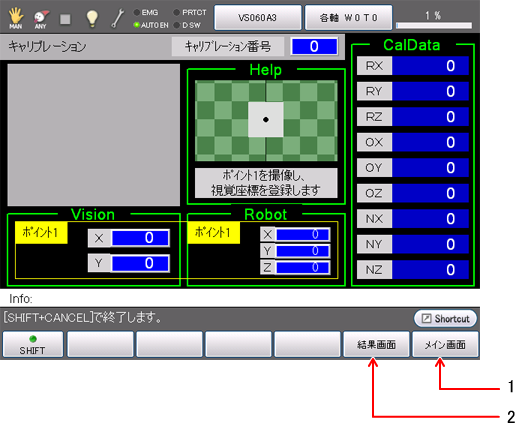
| 1 | メイン画面に切替えます。 |
| 2 | 結果確認画面に切替えます。キャリブレーション結果の確認ができます。 |
ポイント教示方法
視覚座標とロボット座標をそれぞれ1箇所ずつ3箇所を教示する方法です。カメラ画像にマークが1点だけ写るようなキャリブレーション治具を用意し、ポイント1~3の各視覚座標とロボット座標をセットにして教示します。
また、視覚装置が対応する4社の製品の場合、視覚座標の自動入力に対応しています。
結果確認画面
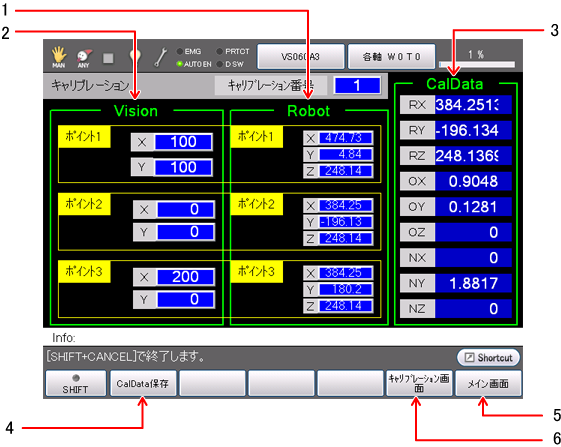
キャリブレーションの計算に使ったマークの視覚座標とロボット座標、およびそれらから計算した結果のCalDataの確認と保存ができます。キャリブレーション番号(0~31)を変更すると、それぞれの計算結果が確認できます。
| 1 | ポイント1~3の登録されたロボット座標を確認できます。 |
| 2 | ポイント1~3の各登録された視覚座標を確認できます。 |
| 3 | 登録された各座標から計算されたキャリブレーションデータを確認できます。 |
| 4 | 計算したCalDataを専用のデータベースに保存します。 |
| 5 | メイン画面に切替えます。 |
| 6 | キャリブレーション画面に戻ります。 |
ID : 5106