
ID : 5105
操作盤を使った視覚キャリブレーション手順
ここでは、RC8シリーズロボットコントローラと視覚装置間の「視覚-ロボット座標キャリブレーション」を用意された操作盤を利用して簡単に実施する手順について説明します。
キャリブレーション用操作盤をご利用いただくには、ご使用のコントローラへのインポートが必要です。
インポート方法はマニュアルの PCソフトウェア>WINCAPSIIIガイド>プログラムの作成 > 既存のプログラムを使う を参照ください。
準備
- 下表にリンクのロボットプログラムおよびBMPファイルをご使用のRC8シリーズロボットコントローラにインポートしてください。
- ご使用の視覚装置が下記の4社の製品の場合、視覚座標の入力を重心検出による自動入力でご使用いただけます。
その他の視覚装置の場合は、視覚座標を手入力することでご使用いただけます。
対応する視覚装置の場合、視覚装置からデータを受信するためのロボットプログラム(TSR10.pcs)と各社の視覚プログラムを下表のリンク先からコピーし、 ロボットプログラムはコントローラへ、視覚プログラムは各社の視覚装置へインポートします。
ロボットプログラム(TSR10.pcs)を起動させた後で、操作盤を起動してください。
会社名 製品 データ キーエンス XGシリーズ inspect.dat (DAT:7KB)
TSR10.pcs (PCS:851B)オムロン FZシリーズ calibration.scn (SCN:6KB)
TSR10.pcs (PCS:772B)コグネックス In-Sightシリーズ 3PointCal.job (JOB:47KB)
TSR10.pcs (PCS:2KB)パナソニックデバイスSUNX PVシリーズ Set00.PV2 (PV2:126KB)
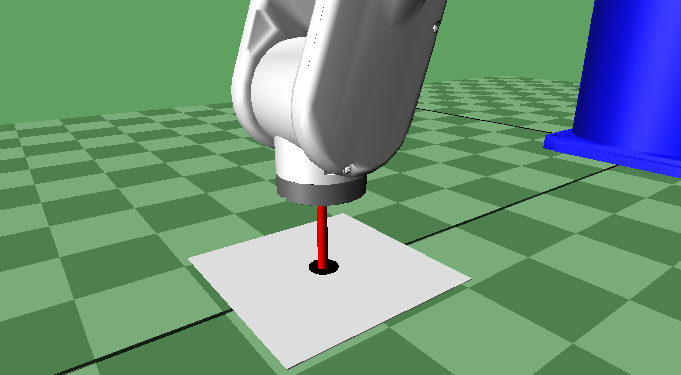
TSR10.pcs (PCS:922B) - キャリブレーション用の治具(マークを印刷したもの)を準備してください。
視覚プログラムでは円の重心位置を求めます。重心位置にロボットのツール位置を合わせ易いように重心位置に十字を記したマーク(下図参考)を用意してください。
マーク例 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
ID : 5105
- このページに関連する情報
- 操作盤画面
- キャリブレーション手順