
ID : 5665
数値入力による視覚キャリブレーション手順
3点の数値入力によるキャリブレーション実施手順
下記の手順で実施します。
1
操作経路:基本画面 - [F8 視覚] - [F1 視覚キャリブレーション]
視覚キャリブレーション画面が開きます。

2
キャリブレーション対象の番号(0~31)のCalデータテーブルを表示させます。
既に入力されている値を確認することもできます。
次の3つの操作方法があります。
-
番号指定
[F3 番号選択]ボタンを押すと、番号選択画面が開きます。番号を入力し、[OK]ボタンを押すと、選択した番号のCalデータテーブルが表示されます。 -
ページ送り
[F1 前ページ]、[F2 次ページ]ボタンを使用し、該当番号のCalデータテーブルを表示させます。 -
カーソル送り
矢印キーまたはジョグダイヤルでカーソルを移動させ、該当番号のCalデータテーブルを表示させます。

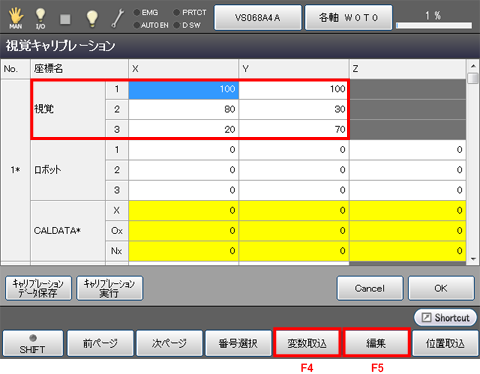
3
視覚の3点の座標(X,Y)を数値で入力します。
次の2つの入力方法があります。
-
数値入力
入力したい箇所を選択し、[F5 編集]ボタンを押すと、数値入力用の画面が開きます。数値を入力し、[OK]ボタンを押すと、選択した箇所に入力されます。 -
変数指定
入力したい点のXまたはYを選択し、[F4 変数取込]ボタンを押すと、V変数の番号を入力する画面が開きます。番号を入力し[OK]ボタンを押すと、変数のX、Yの値が、入力したい点のX、Yにコピーされます。
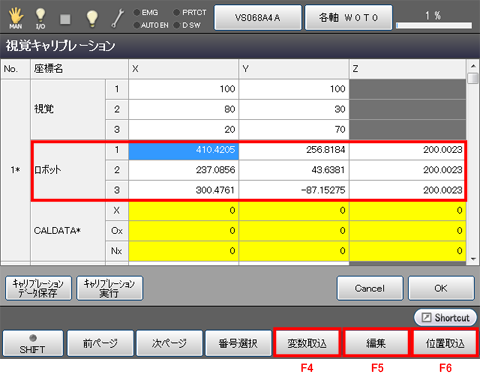
4
視覚の各点に対応したロボットの3点の座標(X,Y,Z)を入力します。
以下の3つの方法があります。
-
数値入力
入力したい箇所を選択し、[F5 編集]ボタンを押すと、数値入力用の画面が開きます。数値を入力し、[OK]ボタンを押すと入力できます。 -
変数指定
入力したい点のX、Y、Zのどれかを選択し、[F4 変数取込]ボタンを押すと、P変数の番号を入力する画面が開きます。番号を入力し[OK]ボタンを押すと、変数のX、Y、Zの値が、入力したい点のX、Y、Zにコピーされます。 -
現在位置取込み
入力したい点のX、Y、Zのどれかを選択し、[F6 位置取込]ボタンを押すと、確認画面が表示されます。[OK]ボタンを押すと、ロボットの現在位置の値が、入力したい点のX、Y、Zにコピーされます。
5
[キャリブレーション実行]ボタンを押します。
変換行列が計算され、「CALDATA」欄に表示されます。
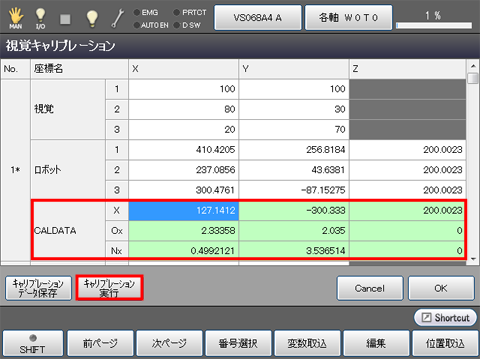
- 視覚座標、ロボット座標とも3点すべて入力されていないと、エラーになり計算はされません。
- 「CALDATA」欄は、[F5 編集]ボタンを押して数値を変更することができます。
6
コントローラ電源OFF後もデータを保持したい場合は、[キャリブレーション保存]ボタンを押します。データが保存用メモリに保存されます。
7
視覚キャリブレーション画面を、下記のどちらかの方法で閉じます。
[OK]ボタンを押すと、データを作業用メモリに保存し、視覚キャリブレーション画面を閉じます。
[Cancel]ボタンを押すと、データを作業用メモリに保存せずに、視覚キャリブレーション画面を閉じます。
作業用メモリのデータは、コントローラの電源OFF時に保持されません。詳細は、プログラマーズガイドの「データの保存と変更」を参照してください。
変換行列の数値入力
別の方法で変換行列を求めることができる場合は、変換行列の値のみを数値入力することもできます。
上記Step1、Step2を実施後、「CALDATA」の該当項目を選択し、[F5 編集]ボタンを押します。
ID : 5665