
ID : 5069
経路点設定手順
ティーチングペンダントの操作による、経路点設定手順を説明します。
設定手順
1
基本画面 - [F2 アーム] - [F6 補助機能] - [F6 経路点]を押します。
「経路点設定画面」が表示されますので、[経路番号]を押して、リストの中から設定する経路番号を選択し、[OK]を押します。
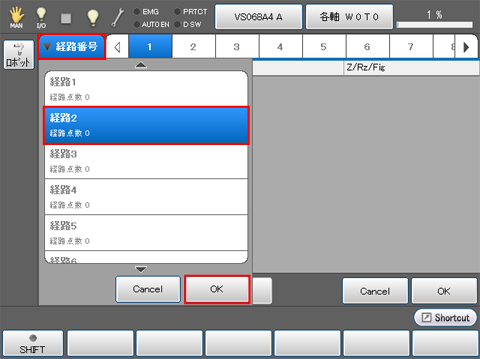
選択した経路番号が反転表示されます。
2
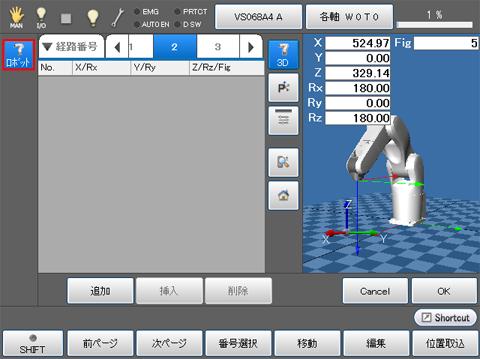
[ロボット]を押して、画面右側にロボットの現在位置情報を表示します。
作業用メモリ内に保存されたデータがある場合は、そのデータが表示されます。
3
ロボットをねらいの位置まで移動し、[追加]を押して、ロボットの現在位置を取り込みます。
- 経路点に登録している位置が変更された場合、各経路番号の右に"*"を表示します。
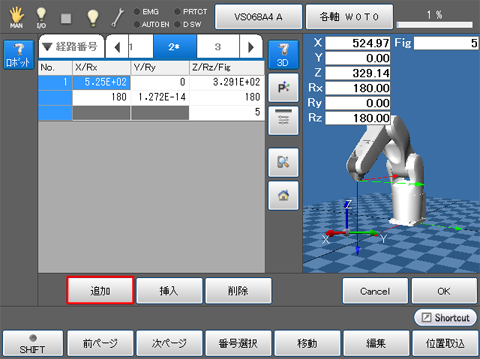
ロボットの現在位置が取り込まれます。
4
ステップ3を繰り返し、必要な数の経路点を登録します。
必要に応じて[追加]、[挿入]、[削除]を使用し登録します。
- [追加]:選択した経路点データの次に経路点が挿入されます。
- [挿入]:選択した経路点データの前に経路点が挿入されます。
- [削除]:選択した経路点データが削除されます。
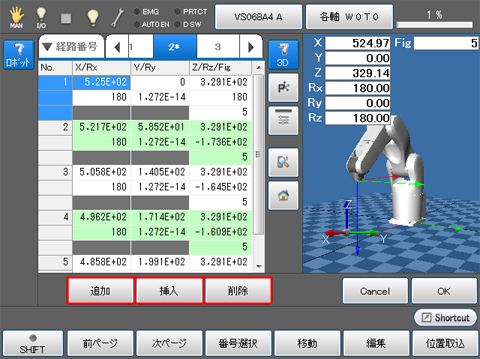
- [移動]、[編集]、[位置取込]、[コピー]、[貼り付け]を行なう場合は、経路点設定画面で各ボタンを押して実行します。
- 登録できる経路点データの数は、5000までです。
5
全ての経路点データの設定が完了後、[OK]を押します。
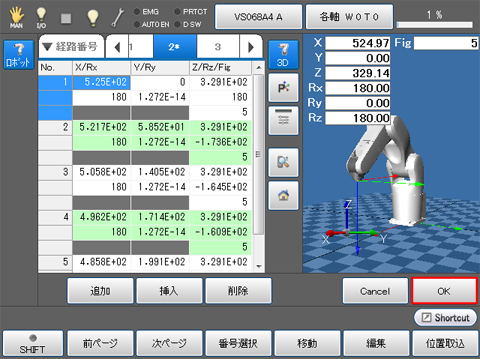
登録した経路点データが保存され、「アーム補助機能画面」に戻ります。
- "*"が付いている経路番号のデータのみ、作業用メモリと保存用メモリに保存されます。
-
PacScriptコマンドで経路点を追加した場合、作業用メモリに保存されています。
「経路点設定画面」では、この保存されているデータを表示させることができます。
しかし、「経路点設定画面」で編集を行わないと保存用メモリに保存することができません。
編集を行った場合、経路番号に"*"が表示されます。
詳細については、「経路点設定機能」を参照ください。
保存せずに画面を閉じる場合は、[Cancel]を押します。
ID : 5069