
ID : 4495
制御ログ
ロボットの各軸の動きや電流値、負荷率など、ロボットの制御に関する記録です。
以下の場合に役立ちます。
- 指定した範囲でのロボットの挙動の確認
- ロボットの経年変化状況の確認
- 予想負荷率によりモータへの負荷の最適化の目安
制御ログは記録する間隔と記録個数を指定することで記録時間を設定できます。
記録するタイミングはティーチングペンダントやWINCAPSIIIからの手動記録と、プログラムからの操作で記録可能です。
プログラムでの記録タイミングの操作は「SysLog.Ctrl.Start」、「SysLog.Ctrl.Stop」、「SysLog.Ctrl.Clear」の3つのコマンドを使用して操作します。詳しくは機能ガイドの「ログ機能」を参照してください。
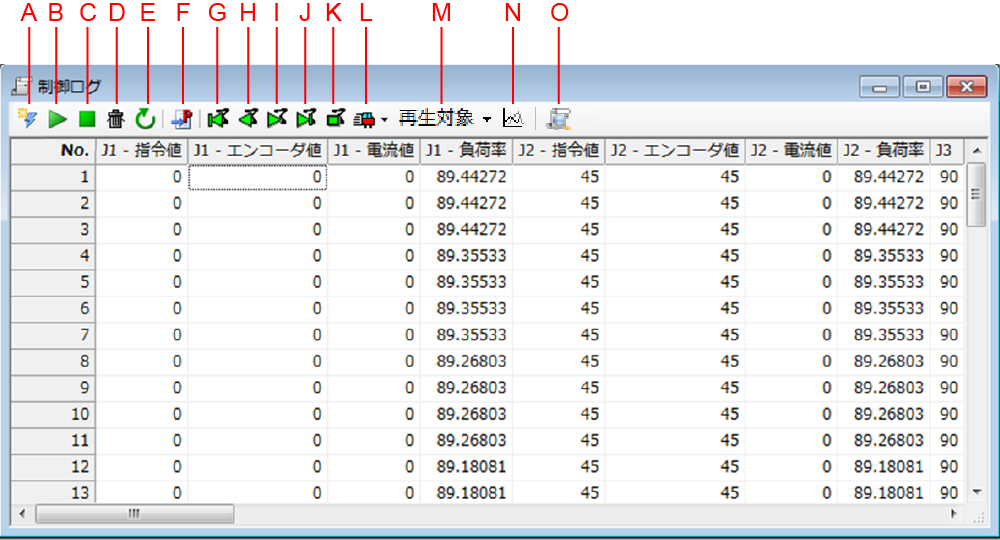
グリッド表示
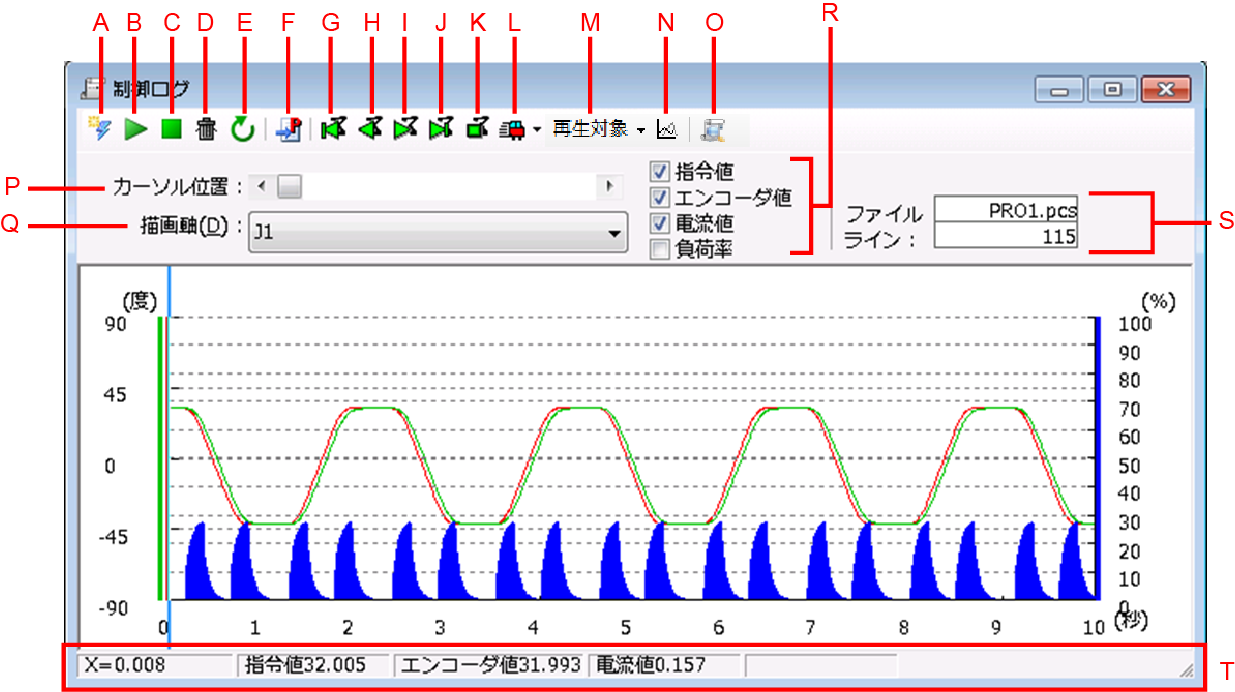
グラフ表示
項目の説明
A:「受信」ボタン
ロボットコントローラから制御ログデータを受信し表示します。
B:「制御ログ開始」ボタン
制御ログの記録を始めます。SysLog.Ctrl.Startを実行します。
C:「制御ログ停止」ボタン
制御ログの記録を終了します。SysLog.Ctrl.Stopを実行します。
D:「制御ログクリア」ボタン
現在保持している制御ログをクリアします。SysLog.Ctrl.Clearを実行します。
E:「制御ログ更新」ボタン
シミュレーション中の制御ログデータを更新します。
F:「該当行へジャンプ」ボタン
選択しているログのプログラム実行行を表示します。
G:「制御ログ動作再現(逆ステップ送り)」ボタン
制御ログを使って「アーム3Dビュー」のロボットを逆ステップ送りで動作させます。
H:「制御ログ動作再現(逆再生)」ボタン
制御ログを使って「アーム3Dビュー」のロボットを逆再生で動作させます。
I:「制御ログ動作再現」ボタン
制御ログを使って「アーム3Dビュー」のロボットを動作させます。
J:「制御ログ動作再現(ステップ送り)」ボタン
制御ログを使って「アーム3Dビュー」のロボットをステップ送りで動作させます。
K:「制御ログ停止」ボタン
制御ログから動作したロボットの動作を停止します。
L:「制御ログ再生速度」
「アーム3Dビュー」のロボットの動作再生速度条件を選択します。以下の2条件から選択します。
- 干渉チェック優先
ロボットの動きをログデータ一行ごとに再生します。 干渉チェック時には干渉判定を優先し、実際の動作速度より遅く再生されることがあります。 - 実時間優先
実際の動作速度にあわせた動作再生をします。(正しく干渉判定されない場合があります。)
M:「再生対象」ボタン
制御ログ再生用のデータを選択します。
N:「グラフ表示/グリッド表示」ボタン
制御ログデータの表示形式(グラフ形式/表形式)を切り替えます。
O:「制御ログ解析」
解析結果(予想負荷率、最大負荷率)を出力ウィンドウに表示します。
- 予想負荷率
ログの範囲の工程を連続で動作した場合の予想負荷率を表示します。80%以上になると過負荷エラーの発生が予想されます。 - 最大負荷率
ログ内の最大の負荷率を表示します。100%を超えると過負荷エラーが発生します。
P:「カーソル位置」
グラフ上のカーソル位置を移動します。
Q:「描画軸」
グラフ上に表示するデータの軸を選択します。
R:表示項目選択
チェックした項目をグラフに表示します。
S:「ファイル」・「ライン」
カーソル位置のファイル名と実行行を表示します。
T:ステータス
カーソル位置の座標とグラフに表示されているログデータのカーソル位置の値を表示します。
ログデータには下記の項目が記録されています。
- 各軸の指令値
指定した記録間隔でのコントローラが指令する各軸の角度 - 各軸のエンコーダ値
各軸の現在の角度値(実測値) - 各軸の電流値
各軸のモータに流れている電流値(定格比)
RC7Mでは「過電流エラー検出レベル比」でした。
- 各軸の負荷率
各軸にかかっている負荷率
ID : 4495