
ID : 4371
「ツール」メニュー
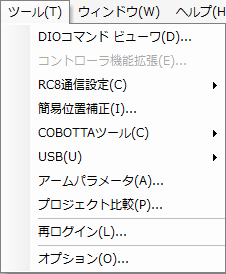
項目の説明
DIOコマンド ビューワ
「DIOコマンドビューワ」ダイアログを表示します。
標準またはミニIO割付時のコマンドパターンを表示します。また、デバッグ機能中は、擬似IOにコマンドパターンを一括セットすることができます。
コントローラ機能拡張
DENSOロボットのオプション機能をWINCAPSIIIから設定します。この機能は、オンライン(モニタ)モード中のみ有効になります。
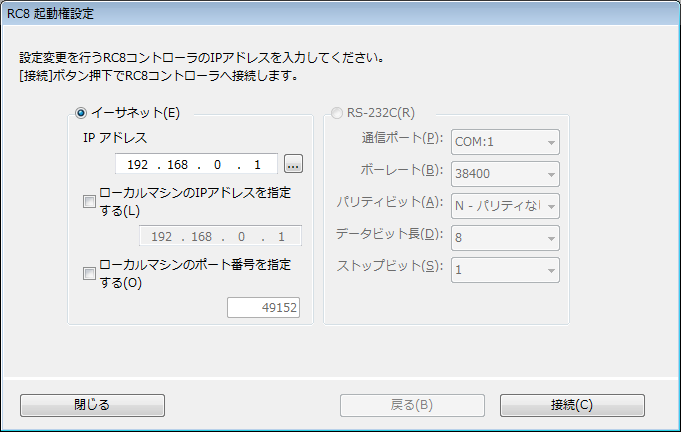
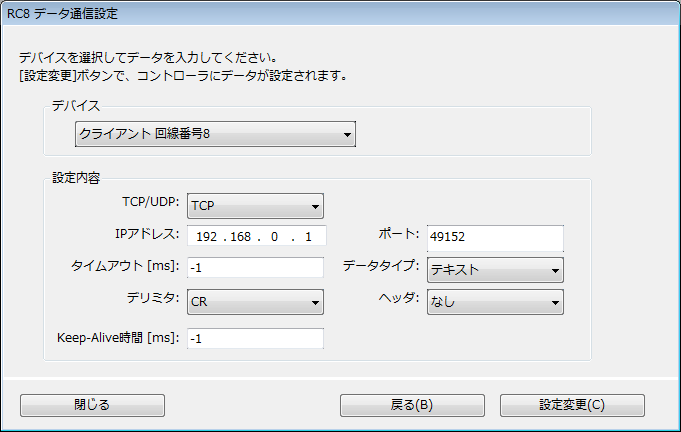
RC8 通信設定
WINCAPSIIIから、コントローラの「起動権設定」、「IP設定」、「データ通信設定」を設定します。
設定は、次の2ステップで行います。
この機能は、Ver2.7.* 以降のコントローラで有効です。
1
設定するコントローラのIPアドレスを入力して[接続]ボタンを押します。
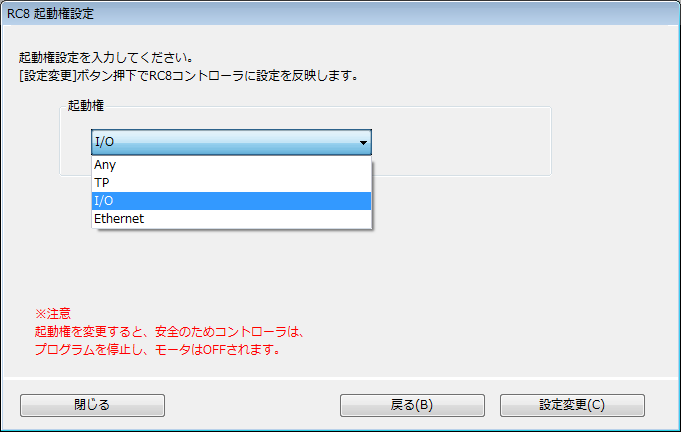
2
必要な項目を入力して、[設定変更]ボタンを押します。
- 起動権設定
RC8の起動権を選択します。
- IP設定
RC8のIPアドレスを設定します。
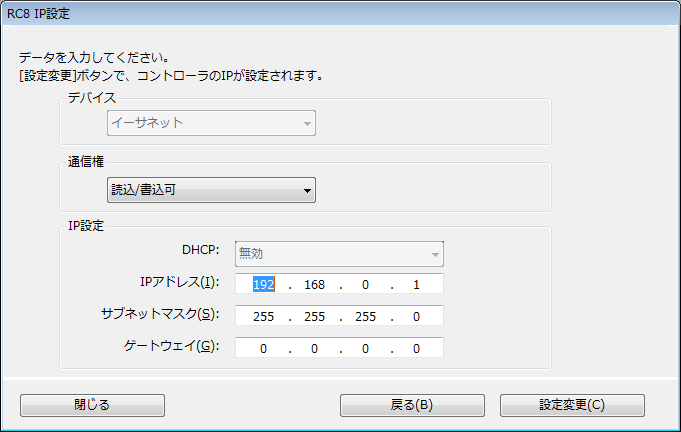
設定したIPアドレスは必ず覚えておいてください。
- データ通信設定
デバイスを選択後、変更する設定項目を設定します。
簡易位置補正機能
ロボットが位置ズレをしてしまった時に、WINCAPSIIIを使って、以下の3項目を簡易的に補正することができます。
- CALSET
モータを交換した時に、基準位置をもとにCALSET値を適正な値に書き換えます。 - TOOL
新規でツール座標を登録したり、ハンド先端がずれてしまった場合にTOOLの値を補正します。 - WORK
ロボットの据付位置を変更したときに、設定していたWORK座標を補正します。
詳しい操作方法は、機能ガイドの「簡易位置補正機能」を参照してください。
USB
プロジェクトデータをUSBメモリから読み込む、またはUSBメモリに書込みます。
書込みは、RC7Mコントローラ専用機能です。
アームパラメータ
コントローラの設定時に必要なアームパラメータを書込み/読込みします。
プロジェクト比較
WINCAPSIIIで現在開いているプロジェクトとコントローラのデータを比較し、結果を別ウィンドウに一覧表示します。
比較結果一覧
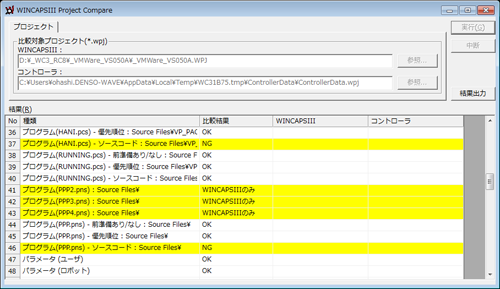
この機能はコントローラからデータを受信するため、通信可能な状態で実行してください。
再ログイン
「WINCAPSIIIログイン」ダイアログを表示します。
ユーザレベルを変更してWINCAPSIIIにログインします。
オプション
「オプション設定」ダイアログを表示します。
エディタの文字色や、通信タイムアウト時間等のオプションを設定します。
以下の機能は、RC7Mコントローラ専用機能のため、RC8シリーズロボットコントローラでは使用できません。
- コントローラ機能拡張
ID : 4371