
ID : 3398
ロボット3台、コンベア1台の構成
コンベアの動きが速く、ロボット2台で取り切れない場合などには、コンベア1台に対し、ロボット3台を使用します。
ここでは、システム構成の内容について、下記項目に分けて説明しています。
システム構成図
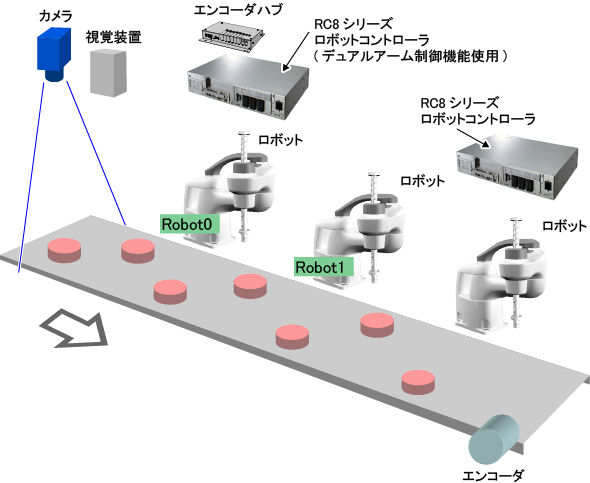
上図は、ビジョントラッキングのシステム構成例です。
結線図
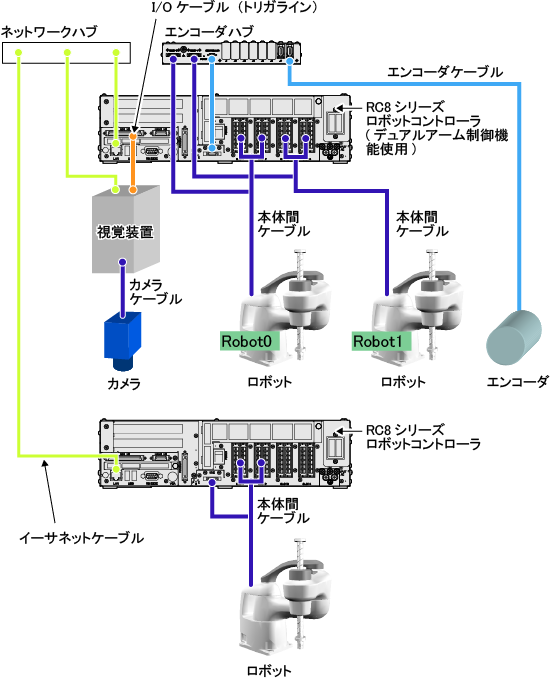
上図は、ビジョントラッキングのシステム構成例です。
エンコーダハブに接続できるエンコーダの数と軸番号については、 "使用可能なエンコーダの数と軸番号" を参照してください。
エンコーダハブについて
エンコーダハブは旧品と新規品があります。
上記結線では、新規品のみ使用可能です。新規品は、ロボットとの接続コネクタが2個ついています。

外形寸法および設置上の注意については、"エンコーダハブ"を参照してください。
注意事項
ここでは、デュアルアーム制御機能を使用するロボットコントローラを "デュアルアームコントローラ"、デュアルアーム制御機能を使用しないコントローラを "通常コントローラ" と呼ぶこととします。
- システムの検討や構築の際には、デュアルアーム制御機能の知識も必要ですので、 "デュアルアーム制御機能取扱説明書" もあわせてお読みください。
-
デュアルアーム制御機能とコンベアトラッキング機能を併用する場合、デュアルアームコントローラでは、使用できるロボットは下記のロボットのみとなります。また、外部付加軸は使用できません。
- HSR
- HSA1
- MC8シリーズモーションコントローラで制御するロボット
通常コントローラについては、上記制約はありません。
- 各ロボットは、お互いに干渉しないように配置してください。
- デュアルアームコントローラに必要なコンベアトラッキング機能のライセンス数は、1つです。2つ用意する必要はありません。通常コントローラについては、通常コントローラ1台に付き1つのライセンスが必要です(上図の場合は、計2つのライセンスが必要です)。
- デュアルアームコントローラは付加軸仕様のものを使用してください。
-
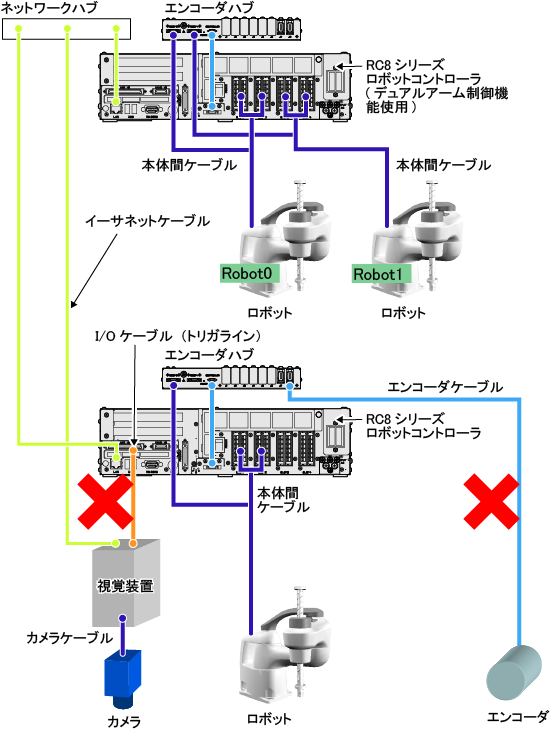
コンベアのエンコーダと視覚装置のトリガラインは、必ずデュアルアームコントローラに接続してください。通常コントローラに接続すると、正しく動作しません(下図を参照)。
- ロボット4台でコンベア1台のワークをピックアップする場合、デュアルアーム制御機能を適用できるロボットコントローラは1台だけです。2つのロボットコントローラにデュアルアーム制御機能を適用し、計4台のロボットでコンベアトラッキングを行うことはできません。
ID : 3398