
ID : 2897
エリア機能を使った設備の保護
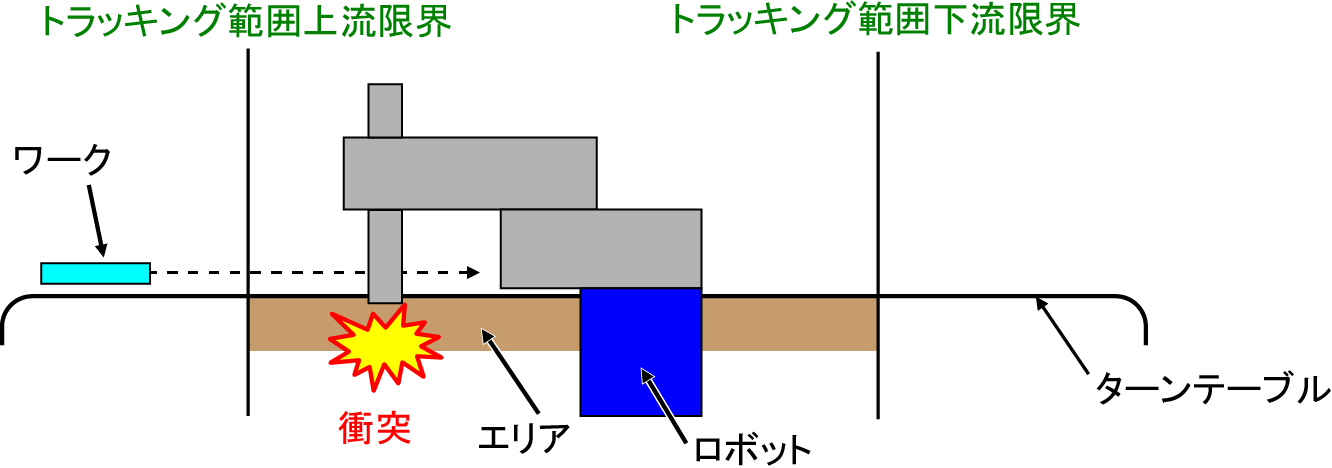
ターンテーブルとロボットの干渉
ロボットコントローラは、ターンテーブルの高さ方向に関する情報を一切保持していません。そのため、下記の図のように、円形トラッキングの過程で、ロボットとターンテーブルが衝突する可能性があります。
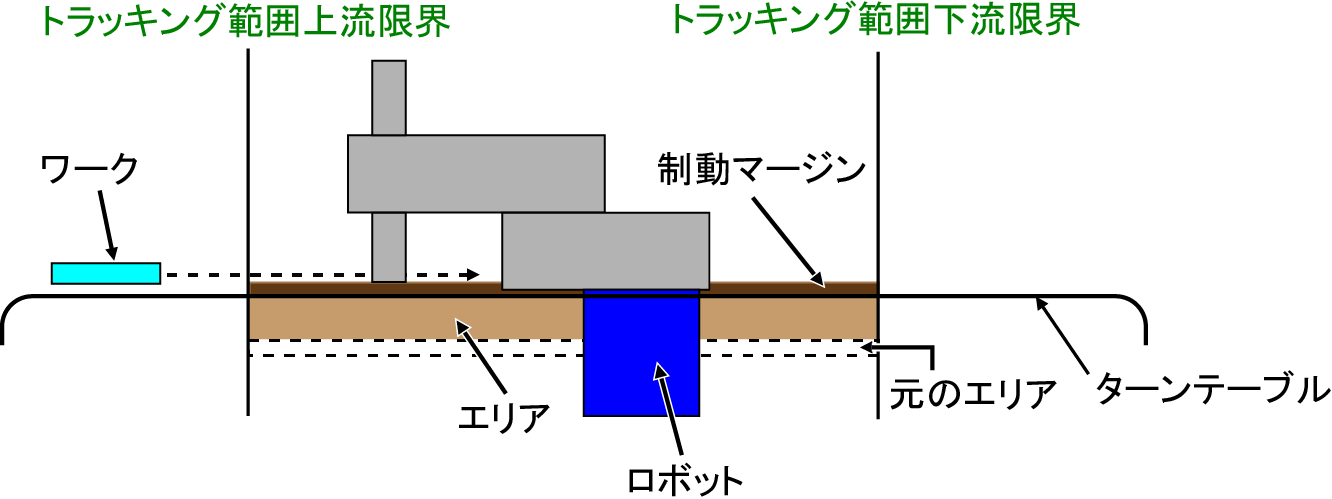
ターンテーブルとロボットの意図しない干渉を防ぐために、エリア機能を使用して干渉チェックを行うことを推奨します。その際、干渉を検出してもロボットはすぐには停止できないため、一定量の制動マージンが必要です。
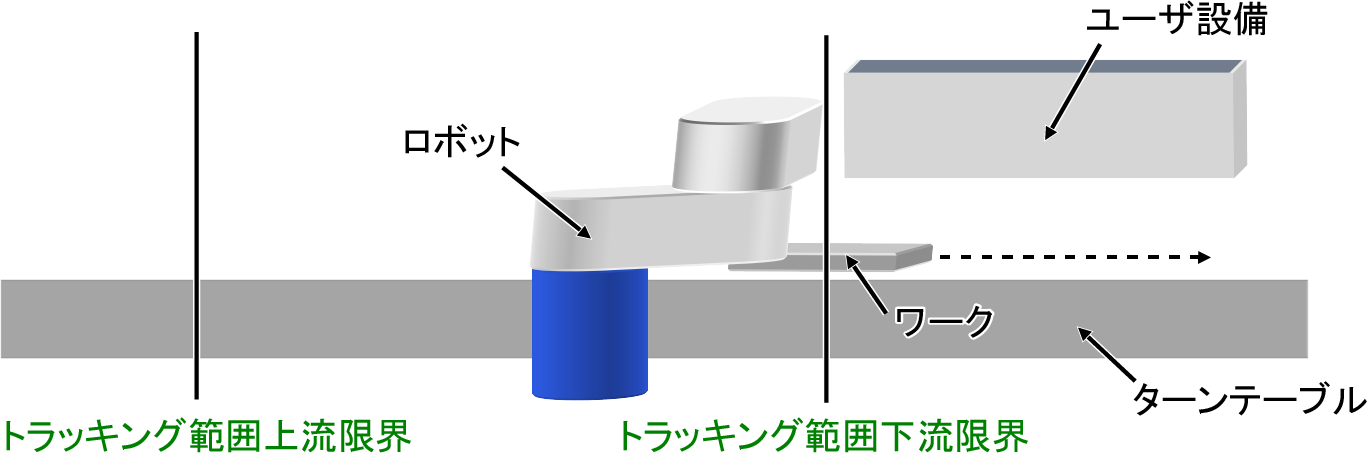
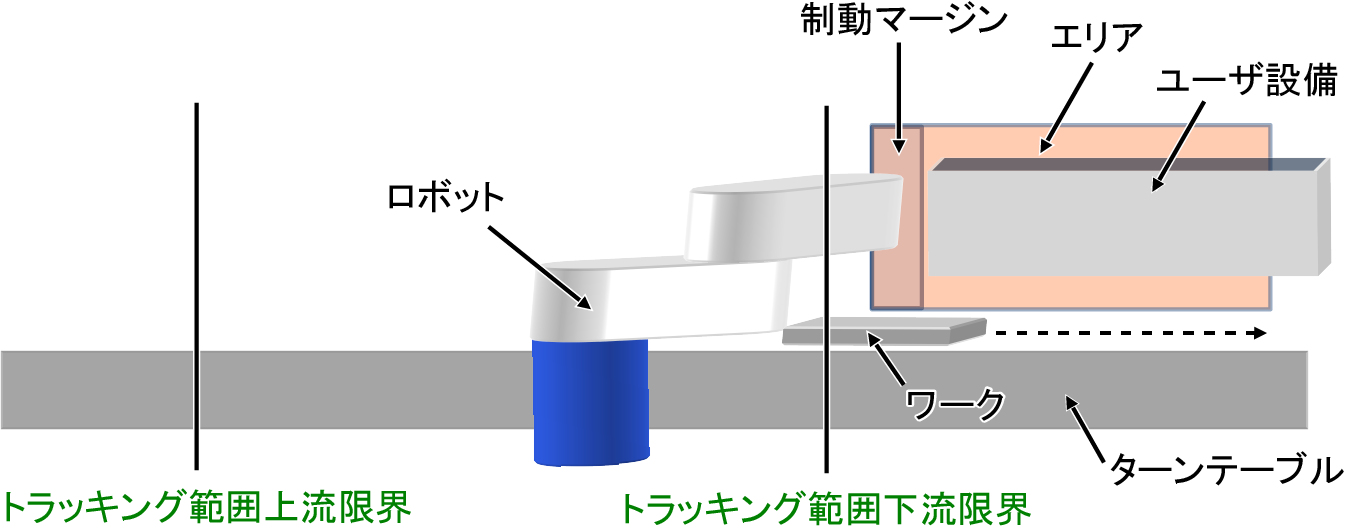
トラッキング範囲の後方にある設備とロボットの干渉
RC8シリーズの円形トラッキングでは、ロボットがターンテーブルに追従する範囲を明確化するために、トラッキング範囲下流限界を設けています。ロボットは、トラッキング範囲下流限界を超えてから減速停止することがあります。また、「TrackStart」コマンドのオプション2の設定を有効にした場合、ロボットは、トラッキング範囲下流限界を超えて動作します。
トラッキング範囲下流限界に対して、十分なマージンを設定していないと、下記の図のように設備とロボットが干渉します。
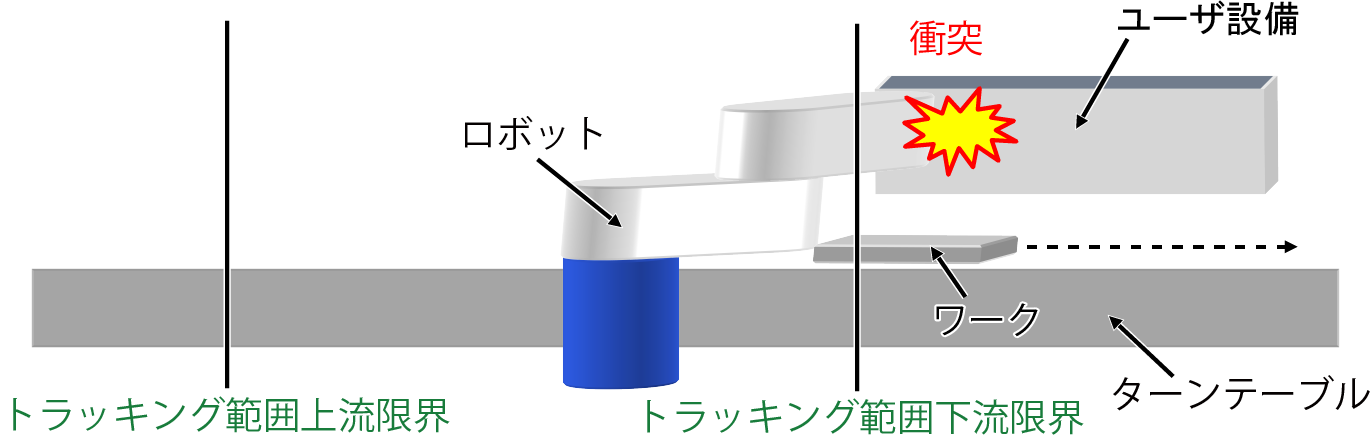
トラッキング範囲下流限界の後方に設置された設備との干渉に十分注意してください。エリア機能を使用して干渉チェックを行うことを推奨します。その際、干渉を検出してもロボットはすぐには停止できないため、一定量の制動マージンが必要です。
設備との干渉を回避する方法として、エリア機能以外に次のような方法があります。
- TrackInRangeコマンドを使用して、下流限界をワークが超えていないか確認する。
- TrackCurPosコマンドを使用して、ワークの現在位置を監視する。
- TrackArrivalTimeコマンドを使用して、下流限界までの到達時間を確認する。
ID : 2897