
ID : 3047
円形トラッキングの目標位置調整と相対動作
円形トラッキング動作中に目標位置を調整したり、相対動作を行う場合は、TrackShiftTargetコマンドやTrackDrawコマンドでオフセット量を指定します。このときのオフセット量は、コンベア座標系で指定します。
これらのコマンドはVer.2.3.*から有効です。
コンベア座標系
円形トラッキングの場合は、下図のような座標系を定義します。
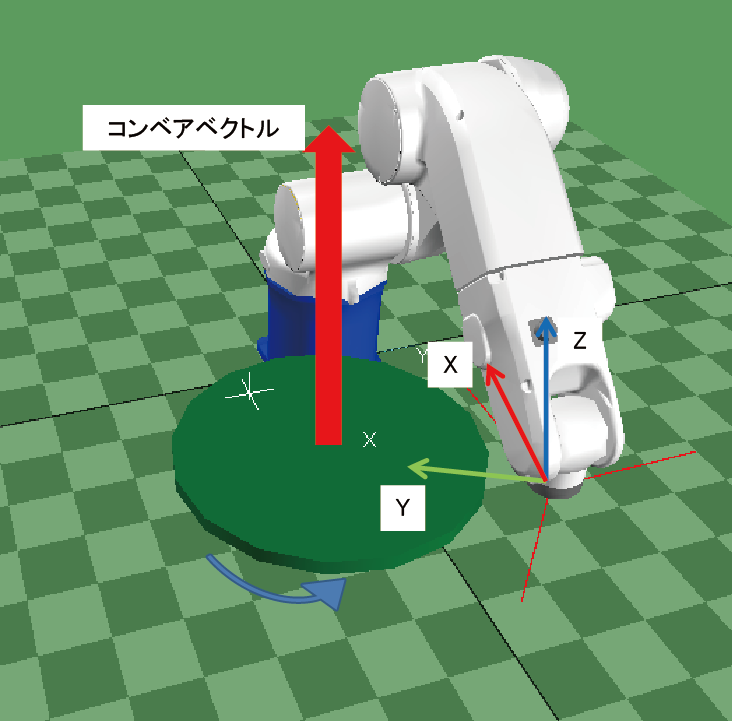
ここで、X軸、Y軸、Z軸は下表のように定義します。Z軸以外はコマンド実行時に基準位置から計算します。
| 軸 | 定義 |
|---|---|
| X軸 | 基準位置におけるターンテーブルの接線方向(テーブルの進行側) |
| Y軸 | 基準位置とテーブル中心を結ぶベクトル |
| Z軸 | コンベアベクトル |
なお、基準位置は下表のように、コマンドによって異なります。
| コマンド | 基準位置 |
|---|---|
| TrackShiftTarget | 現在のワーク位置 |
| TrackDraw | ロボットの現在位置 |
目標位置調整
下図のようにトラッキング動作の目標位置を調整したい場合は、TrackShiftTargetコマンドを使用します。
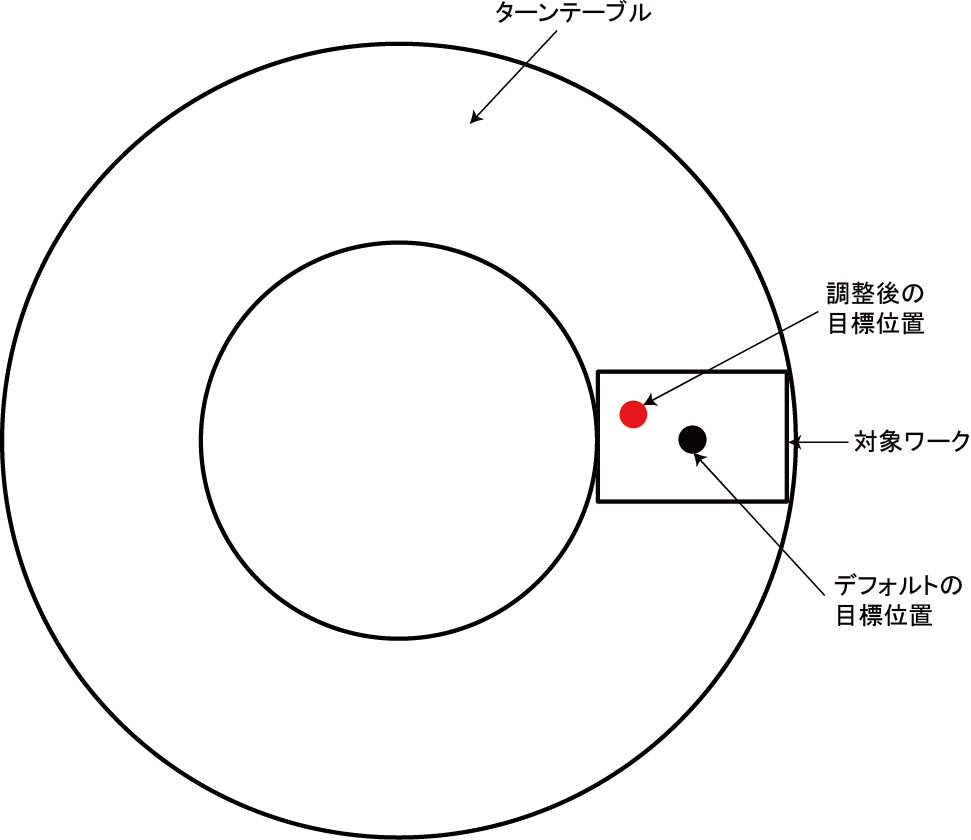
下記のように、プログラミングします。
P10 = TrackTargetPos(1)
TrackShiftTarget 1, V(5, 10, 0)
TrackMove P, P10 この例では、TrackMoveで、デフォルトの目標位置に対し、ターンテーブルの接線方向に5mm、目標位置とテーブル中心を結ぶベクトル方向に10mmオフセットした位置に動作します。
相対動作
下図のようにトラッキング動作中に相対動作をしたい場合は、TrackDrawコマンドを使用します。
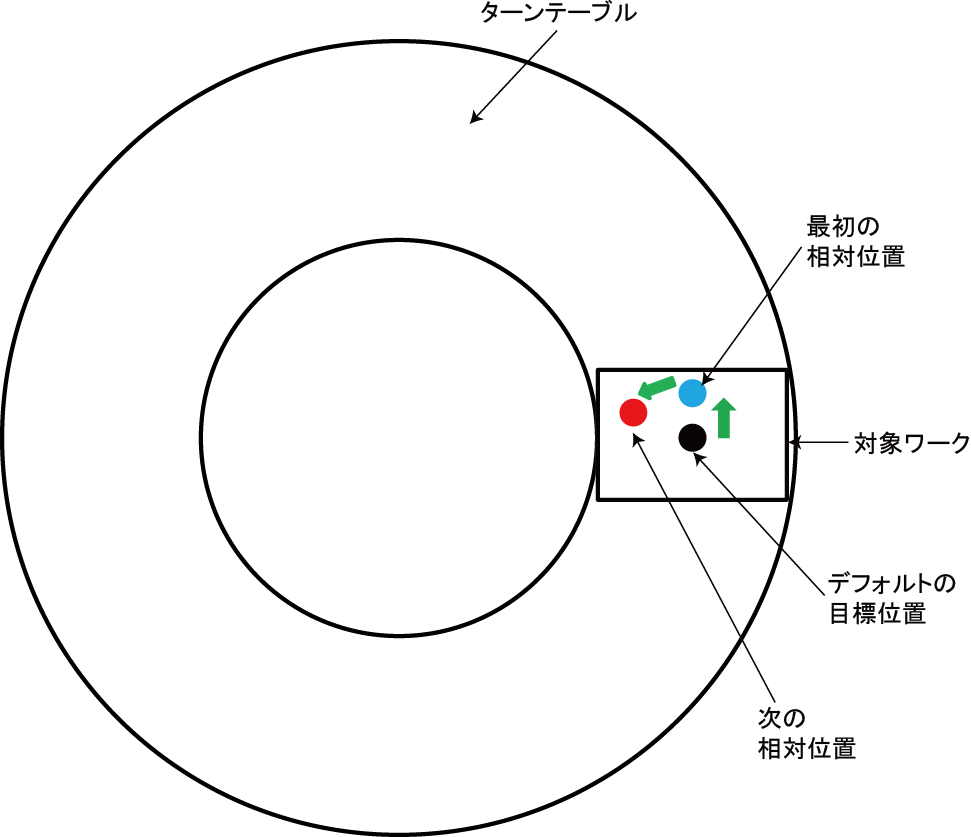
下図のようにプログラミングします。
P10 = TrackTargetPos(1)
TrackMove P, P10
TrackDraw P, V(5, 0, 0)
TrackDraw P, V(0, 10, 0) この例では、TrackMoveでデフォルトの目標位置に動作し、TrackDrawでそこからターンテーブルの接線方向に5mm離れた位置に動作します。さらに次のTrackDrawで、そこからテーブル中心を結ぶベクトル方向に10mm離れた位置に動作します。
ID : 3047