
ID : 2602
RSM出力
機能
コントローラのRSM機能の有効状態を出力します。(2系統)
端子番号
| 信号名 | 端子番号 |
|---|---|
| RSM1出力(系統1) | MotionI/O OutputのNo.3、37 |
| RSM1出力(系統2) | MotionI/O OutputのNo.17、51 |
| RSM2出力(系統1) | MotionI/O OutputのNo.5、39 |
| RSM2出力(系統2) | MotionI/O OutputのNo.19、53 |
| RSM3出力(系統1) | MotionI/O OutputのNo.7、41 |
| RSM3出力(系統2) | MotionI/O OutputのNo.21、55 |
使用方法
RSM機能の状態確認に使用します。
詳しくは、「安全回路(セーフティモーション)」を参照してください。
ON条件
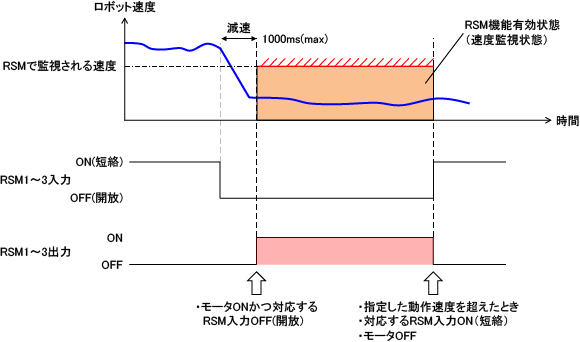
モータON状態で、RSM機能が有効のときにONします。
- 自動モード
・RSM1入力がOFF(開放)時に、RSM1出力をONします。
・RSM2入力がOFF(開放)時に、RSM2出力をONします。
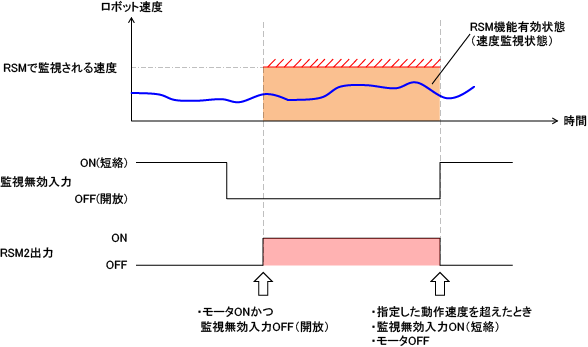
・RSM3入力がOFF(開放)時に、RSM3出力をONします。 - 手動モード
ロボット動作速度が250mm/sで制限・監視されるため、RSM1~3入力に関わらず、RSM2出力のみONします。
OFF条件
- 自動モード
・ロボットが指定した速度を超えたときにOFFします。
・RSM1~3入力がON(短絡)時に、対応するRSM1~3出力がOFFします。
・モータOFF時に、RSM1~3出力がOFFします。 - 手動モード
・ロボットが250mm/sを超えたときに、RSM2出力がOFFします。
・監視無効入力がON(短絡)時にRSM2出力がOFFします。
・モータOFF時に、RSM2出力がOFFします。
状態図
自動モード
手動モード
ID : 2602