
ID : 2484
Robot Position Monitoring (RPM)
機能
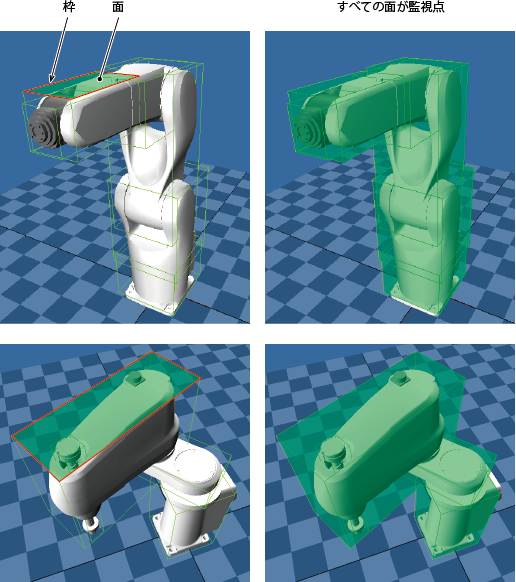
ロボット上の監視点が、指定した範囲を超えていないかを監視する機能です。
指定した範囲を超えると、SS1機能が働き、ロボットを停⽌しモータ電源をOFFします。各監視点が監視領域外に出ないことを保証する機能ではありません。
監視点は下記の場所です。
- ロボットアームを囲む枠で形成される面
規制領域には下表の2種類があります。
| 領域 | 内容 |
|---|---|
| 常時規制領域 | ロボットが領域内かどうか常に監視する。 |
| 一時規制領域 | 「監視領域*無効入力」の指定により、監視するかしないかの切替えができる。 |
使用条件
| 入力信号 | 監視無効入力(手動モードのみ有効)、ツール番号入力*、監視領域*無効入力 |
|---|---|
| 出力信号 | RPM出力 |
| 監視対象 | ロボット軸、付加軸 |
| 監視範囲設定 | 常時規制領域:ユーザによる設定必須。ロボットを囲うように設定 一時規制領域:ユーザにより任意に設定 |
| Reaction time | 50ms(Max) |
| Process Safety Time (PST) | 100ms |
| 実行モード | 自動モード、手動モード |
| 機能の開始タイミング |
|
注1:監視無効入力を使用する場合はセーフティパラメータの「15:監視無効入力設定」を「1:有効」にする必要があります。詳細は「監視無効入力」を参照してください。
使用方法
ツール番号の指定方法
Motion I/O入力の「ツール番号入力*」でツール番号を指定します。この場合、「ツール番号入力*」の4つを2進数とみなして、ひとつのツール番号を指定します。
例:TOOL1を指定する場合、「ツール番号入力0」をONし、「ツール番号入力1」~「ツール番号入力3」をOFFする。
一時規制領域の指定方法
Motion I/O入力の「監視領域*無効入力」により、一時規制領域別に監視する/しないを指定できます。
「監視領域*無効入力」がONの監視領域内では、監視をしません。OFFにすると、監視します。
注意事項
- ロボットが付加軸に設置されている場合、ロボットの位置は付加軸の移動分、移動した位置となります。
-
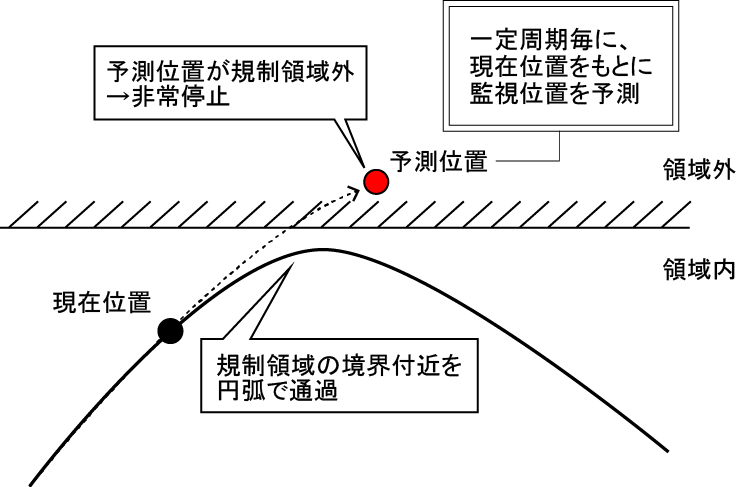
規制領域の境界付近を通過させる場合、エラーがでることがあります。エラーがでる場合、回避方法として、以下のものがあります。
- 規制領域の境界付近を通過するとき、現在の経路より、規制領域の境界から離れたところを通るようにする(現在位置、目標位置、動作方法などを調整する)。
- 規制領域の境界付近を通過するときの速度を下げる。
ID : 2484