
ID : 2474
RSM入力
機能
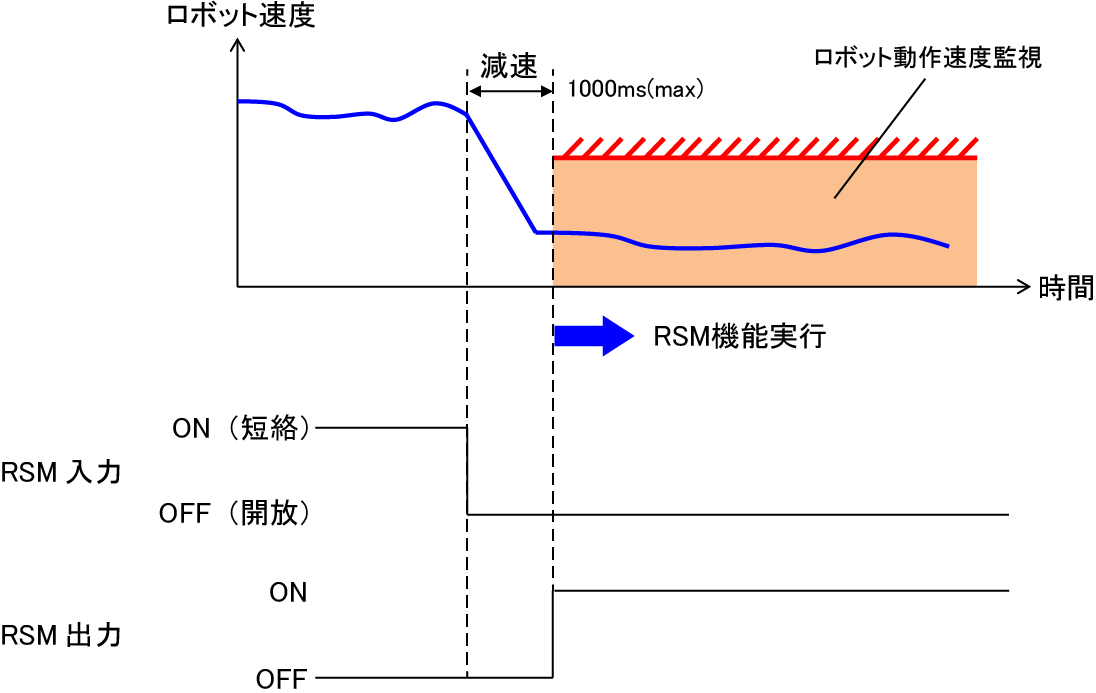
- 自動モードにおいてRSM入力をOFF(開放)にすることにより、外部機器からRSM機能を実行します。ロボットを減速し、規定速度制限値を超えていないことを監視します。
(2系統)
選択する入力によって動作速度制限値が異なります。
信号名 ロボット動作速度制限値 RSM1入力 125mm/s RSM2入力 250mm/s RSM3入力 500mm/s - 手動モードにおいてはRSM入力に関わらず、ロボット動作速度制限値250mm/sを超えないことを監視します。
端子番号
| 信号名 | 端子番号 |
|---|---|
| RSM1入力(系統1) | Motion I/O InputのNo.2、36 |
| RSM1入力(系統2) | Motion I/O InputのNo.18、52 |
| RSM2入力(系統1) | Motion I/O InputのNo.3、37 |
| RSM2入力(系統2) | Motion I/O InputのNo.19、53 |
| RSM3入力(系統1) | Motion I/O InputのNo.4、38 |
| RSM3入力(系統2) | Motion I/O InputのNo.20、54 |
入力条件と動作
- 自動モードでOFF(開放)になった場合、ロボット動作速度を制限、監視します。手動モード・ティーチチェックモードではRSM入力は何もしません。
- 自動モードでロボット動作速度を制限しない場合は、この入力をON(短絡)する必要があります。
- 自動モードで複数の速度監視入力がOFF(開放)になった場合、その中の低い値の速度制限で制限・監視します。
- RSM入力の2経路の状態が約0.5秒以上異なる場合は、何らかの異常があったと判断し、エラーが発生しモータ電源が切れます。
- 2つのRSM入力は別々の接点で制御してください。1つの接点での2回路並列接続や1回路常時短絡は、外部回路異常と判断し動作できません。
状態図
ID : 2474