
ID : 2258
機能説明
この機能では、ロボットが侵入しようとしている排他エリアに対し、すでに他のロボットが侵入しているときは、減速または停止することで排他エリアへの複数ロボットの侵入を禁止します。
マスタコントローラで情報を管理し、その情報を基に、マスタコントローラと各スレーブコントローラが自ロボットの制御を行います。
- 排他エリアとロボットの動作開始位置が近すぎたり、動作スピードが速すぎる場合、監視のタイミングが合わず、排他エリア内に侵入してエラーで停止することがあります。
- ロボット軸と走行軸は同じアームグループに設定してください。
ロボットコントローラのソフトウェアバージョンは、マスターコントローラとスレーブコントローラで、同じである必要があります。
ソフトウェアバージョンの表記は、ピリオドで数字を3つに分けています。
3つの数字の内、左から2つのバージョンがマスターコントローラとスレーブコントローラで同じであれば、使用可能です。
<例>
ソフトウェアバージョン 使用可能/不可能 マスターコントローラ スレーブコントローラ 2.0.2 2.0.0 使用可能 2.2.0 2.0.0 使用不可能
- コンベアトラッキングとの同時使用はVer.2.8.*以降で可能です。
- 協調機能との同時使用はVer.2.0.*以降で可能です。
- 以下の機能については、停止予測位置が正確に求めれないため、排他制御で停止する際、エラー0x84201563「排他エリア現在値侵入検知」が発生する場合があります。
電流制限機能(ZForceも含む)、力制御機能(センサ有、センサ無)、b-CAPスレーブ - 排他制御の待機状態の時には、見た目上は停止していても、その後急に動き出す場合があるため、ロボットの状態を取得するコマンド(MotionComplete等)やI/Oでは「ロボット動作中」状態を返すようになっています。
監視対象
下記を監視対象として設定できます。
- ロボットと排他エリア
- ツールと排他エリア
排他エリア
排他エリアの形状は直方体のみで、最大32個まで設定できます。
排他エリアはワールド座標系で設定します。また、WINCAPSIII、ティーチングペンダントおよびプログラムで、監視の有効/無効を切替えることができます。
ワールド座標系を有効にするためには、各コントローラでベース設定が必要です。
排他エリアの色表示について
通常、3D画像上の排他エリアの色は"水色"ですが、待機状態は"黄色"、排他エリアに侵入した場合は"紫"に変わります。
排他エリアに侵入している状態での開始/変更
ロボット監視モデルまたはツール監視モデルが排他エリアに侵入している状態で、以下のように監視を開始または変更した場合、「0x83201564:排他エリア現在値衝突検知(自動モード)」のエラーが発生します。
- コントローラの再起動。
- 排他エリアを無効から有効に変更。(自動モードまたはティーチモード時)
- 排他エリアの定義を変更。(自動モードまたはティーチモード時)
監視有効状態
自動モードおよびティーチモード時のみ排他制御を行います。
下記の状態へ切替えた時は、切替え前の状態を保持します。
- 手動モードへ切替えた時
- 排他エリアを無効にした時
- 監視を無効にした時
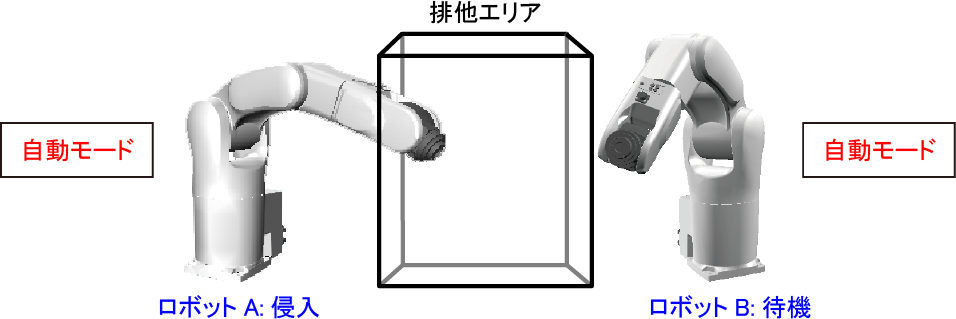
注意すべき動作例
下の例のように、手動モードでエリア外への退避を行った場合は、待機中の他ロボットが勝手に動き出す可能性がありますので注意してください。
1
ロボットAが侵入し、ロボットBが待機している状態。
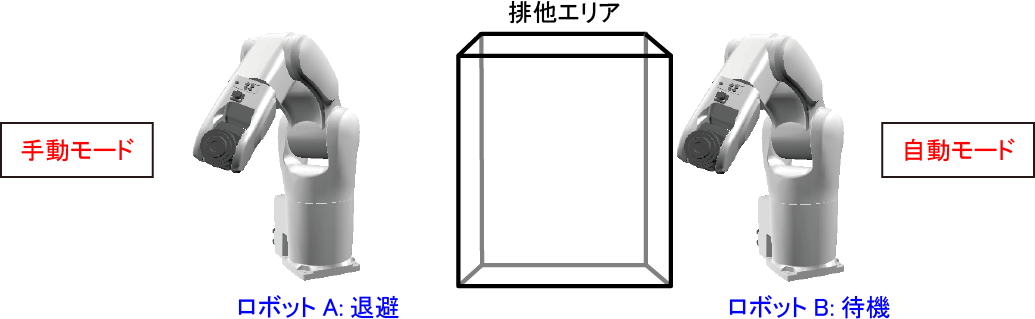
2
ロボットAを手動モードに切替えて、エリア外へ退避させる。この時、ロボットAが切替え前の状態を保持しているので、ロボットBは待機を継続する。
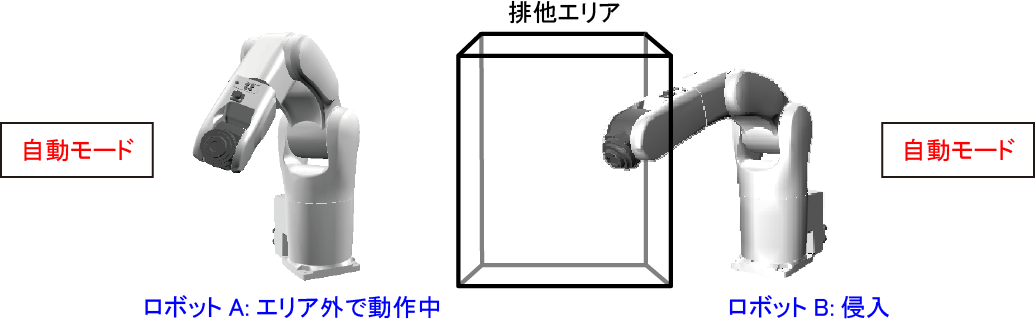
3
ロボットAを手動モードから自動モードに切替える。この時、ロボットAがエリア外にいる状態に切替わるので、ロボットBが侵入開始する。
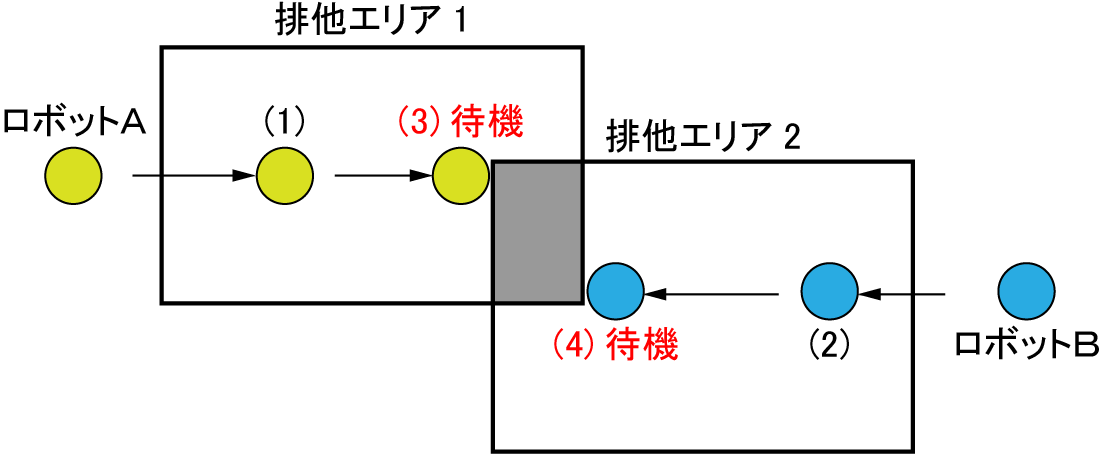
排他エリア重なり時の注意
排他エリアが重なる場合は、ロボット同士が待機状態になり、動かなくなってしまいます。
また、排他エリア同士が近い場合も、動かなくなる可能性があります。
動かなくなる例
(1)ロボットAが排他エリア1に侵入
(2)ロボットBが排他エリア2に侵入
(3)ロボットAが排他エリア2に侵入しようとするが、ロボットBが入っているため、ロボットAは待機
(4)ロボットBが排他エリア1に侵入しようとするが、ロボットAが入っているため、ロボットBは待機
待機タイムアウト発生時の解除方法
排他エリアに侵入中のロボットを手動モードでエリア外に退避させ、自動モードに切替えることで、排他エリアにロボットが侵入している情報がクリアされますので、その後、動かしたいロボットを自動モードにし動作させてください。
- 待機タイムアウトでエラーが発生し停止したロボットは、手動モードでのみ動作可能です。
- 待機タイムアウトでエラーが発生し停止したロボットを移動させるだけでは、動作は開始できません。
- 待機タイムアウトでエラーが発生し停止したロボットを別のプログラムに切替えても、そのままでは動作は開始できません。
ID : 2258