
ID : 1994
ロボット安全規格への対応処置
協調機能を使用する場合に、ロボット安全規格ISO10218に準拠する時には下記対応が必要になります。
- マスタ-コントローラ、スレーブコントローラともにISO10218に準拠可能な仕様のロボットコントローラをご使用ください。また、安全用信号への配線を正しく接続してください。
詳細は下表を参照してください。
RC8A/RC8 仕様 ISO10218への準拠 安全用信号の配線方法 RC8A 標準仕様 可能 "RC8A 標準仕様の安全用信号の配線"を参照してください。 セーフティモーション仕様 "RC8A セーフティモーション仕様の安全用信号の配線"を参照してください。 セーフティI/Oレス仕様 不可能 - RC8 標準仕様 可能 "RC8 標準仕様の安全用信号の配線"を参照してください。 セーフティI/Oレス仕様 不可能 - - ティーチングペンダントをスレーブコントローラに装着しないでください。
- 動作ロボットを明示してください。
動作ロボットを明示するには、次の2つの内容を実施します。
(1) 連動するロボットに割り振られたロボット名を、視認できるようにする。 協調機能を使用する際は、連動するロボットに"Robot0"、"Robot1"といったロボット名を割り振ります。そのロボット名のロボットが実際にどのロボットなのかを視認できるようにします。
<例> ロボットのベースにラベル貼付 (ラベルはお客様でご準備ください。)
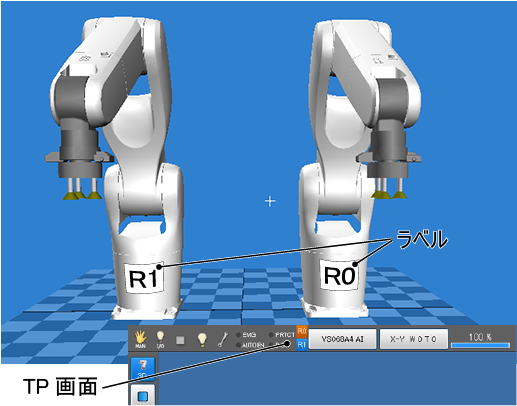
(2) ロボットのモータ電源がONしているかどうかを、視認できるようにする。 <例> モータ電源に連動するMini I/Oの出力信号を利用し、ランプを点灯

マスターコントローラ、スレーブコントローラそれぞれ接続します。
- RC8Aの配線例
安全用信号に追加して、下図の配線をMini I/Oコネクタへ接続する。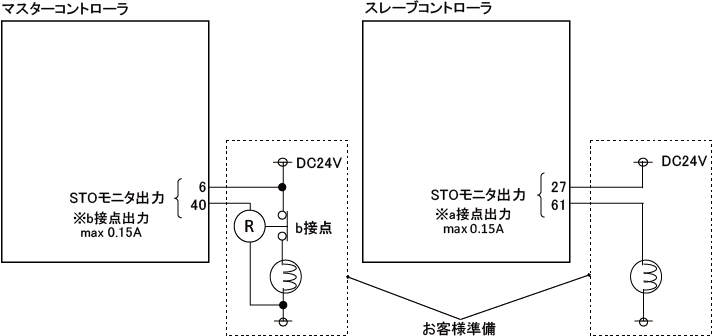
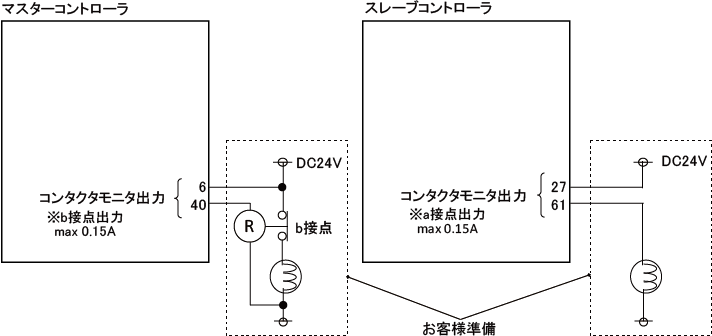
- RC8の配線例
安全用信号に追加して、下図の配線をMini I/Oコネクタへ接続する。
- RC8Aの配線例
ID : 1994