
ID : 1505
加減速相対位置移動・把持
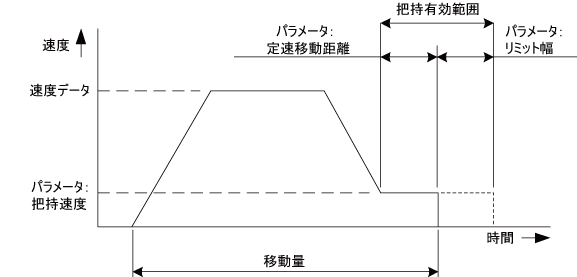
現在位置基準で指定した位置の手前まで台形速度制御にて移動し、把持直前でパラメータにて指定した把持速度にて移動します。その時の把持力は、指定した把持力となります。
パラメータにて指定したリミット幅と定速移動距離の範囲内で把持した場合はHOLD信号とZON信号が出力されます。
把持有効範囲を越えた場合、移動量+リミット幅で停止し、HOLD信号がOFFした状態で、INPOS信号がONします。
パラメータは電動ハンドライブラリのパラメータ編集画面で確認・編集が可能です。
把持有効範囲外で把持した場合はHOLD信号がONし、ZON信号がOFFとなります。
注)定速移動距離内にいても把持動作は行います。
リミット幅内にいる時に加減速絶対位置移動・把持動作を行うと、最終位置に動作するのみで把持動作は行いません。防止するにはリミット幅を最小値にしてください。
ID : 1505