
ID : 997
ロボット異常(出力)
機能
サーボ異常、プログラム異常などロボットに異常が発生したことを外部へ出力します。
使用方法
- 外部操作盤等のロボット異常のランプ表示に使用します。
- 「ロボット異常」を受けPLCが異常処置を行なう場合に使用します。
ON条件
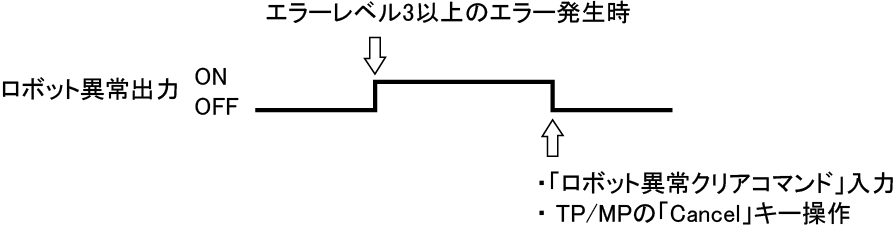
エラーレベル3以上のエラー発生時にONします。
エラーレベルについては、エラーコードの「エラーレベルについて」を参照ください。
OFF条件
下図に示す以下の条件でOFFします。
- 外部から「ロボット異常クリアコマンド」が入力され、異常が解除されたときにOFFします。
- ティーチングペンダント・ミニペンダントで「OK」または「Cancel」キー操作により異常を解除したときにOFFします。
状態図
 |
ID : 997