
ID : 996
ロボット運転中(出力)
機能
ロボットが運転中(プログラム実行中のタスクが一つ以上)であることを、外部へ出力します。
使用方法
外部操作盤等のロボット運転中のランプ表示に使用します。
[全プログラム停止]でOFFするので、停止したことを外部へ出力できます。
ON条件
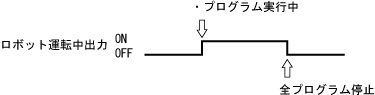
プログラム実行中ON(条件分岐、タイマーコマンドでウエイト中もON)します。
ただし、特権タスク、操作盤タスク起動時には、この信号はONしません。
OFF条件
[全プログラム停止]でOFFします。
[全プログラム停止]とは、ティーチングペンダント・ミニペンダントの「ロボット停止」、「STOP」ボタンの操作および、「瞬時停止」(全タスク)」、「ステップ停止(全タスク)」、「ロボット停止」の入力を意味します。
状態図
 |
ID : 996