
ID : 38
ロボットハンド設計上の注意点
ロボットのハンドを設計するときは、以下の項目がロボットの仕様を超えないように設計します。(ロボットの仕様参照)
- 最大可搬質量
- 最大許容イナーシャ(慣性モーメント)
- 最大許容モーメント
ハンド設計の計算にはハンドだけでなくワークや配線、配管などフランジに負荷のかかるものすべてを考慮に入れてください。
ハンド(ワークを含む)は振動しないように設計してください。
ロボットハンド設計上の注意点を守らない場合、ロボット本体の各締結部にゆるみ、ガタが発生し、位置ズレする可能性があり、ロボットおよびロボットコントローラが破損する危険があります。
微低速での動作が続く場合、過負荷のエラーが発生することがあります。
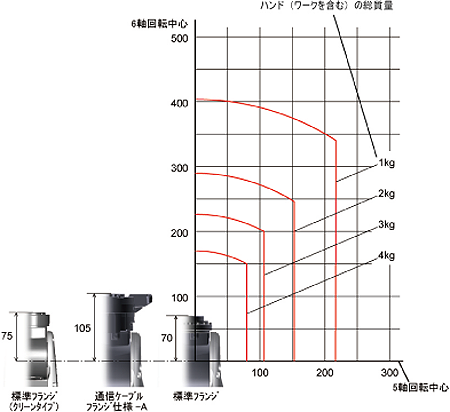
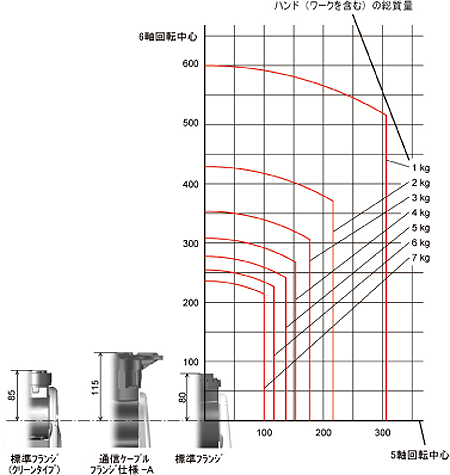
下図はハンド (ワークを含む) の体積が比較的小さい場合の重心位置の分布を示しています。下図を参考にハンドの設計をしてください。
VS-050 / 060
VS-068 / 087
設計したハンド・ツールのJ4、J5、J6回り慣性モーメントを求めるときには、「ハンド設計に関する計算事例」を参考にしてください。
ロボットハンド取り付け時の注意
基準穴φ5H7には、ピンで叩き込むような外力を加えないでください。故障の原因となります。
基準穴については、「第6軸のCALSET位置について (標準タイプロボット、標準フランジ)
」、「第6軸のCALSET位置について (標準タイプロボット、通信ケーブルフランジ仕様-A)
」、または「第6軸のCALSET位置について (防塵防滴タイプおよび耐悪環境タイプ)
」を参照してください。
ID : 38