
ID : 7395
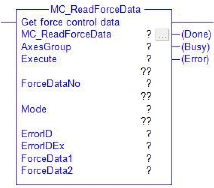
MC_ReadForceData
力制御の各要素のデータを返します。
| グラフィック表示 | AOIカテゴリ |
|---|---|
 |
非動作 |
入出力変数
| 変数名 | データ型 | 有効範囲 | 入出力条件 |
|---|---|---|---|
| AxesGroup | eRC_AxesGroup | - | |
|
|||
| ForceData1 | eRC_Vector | 出力用 | |
|
|||
| ForceData2 | eRC_Vector | 出力用 | |
|
|||
入力変数
| 変数名 | データ型 | 有効範囲 |
|---|---|---|
| Execute | BOOL |
|
|
||
| ForceDataNo | INT | 0 ~ 15 |
|
||
| Mode | INT | -1, 0 |
|
||
出力変数
| 変数名 | データ型 / 説明 |
|---|---|
| Done | BOOL |
|
|
| Busy | BOOL |
|
|
| Error | BOOL |
|
|
| ErrorID | INT |
|
|
| ErrorIDEx | DINT |
|
機能説明
| データ番号 | 要求データ1 |
要求データ2 |
|---|---|---|
| 0 | 力制御座標系でのセンサ値[N] | 力制御座標系でのセンサ値[Nm] |
| 1 | センサ出力値[pulse/N] | センサ出力値[pulse/Nm] |
| 2 | 力制御座標系での力のプラスピーク[N] |
力制御座標系でのモーメントのプラスピーク[Nm] |
| 3 | 力制御座標系での力のマイナスピーク[N] | 力制御座標系でのモーメントのマイナスピーク[Nm] |
| 4 | 力制御開始時からの力制御座標系での手先位置の変位量(指令値)[mm] | 力制御開始時からの力制御座標系での手先位置の変位量(指令値)[deg] |
| 5 | 力制御開始時からの力制御座標系での手先位置の変位量のプラスピーク(指令値)[mm] | 力制御開始時からの力制御座標系での手先位置の変位量のプラスピーク(指令値)[deg] |
| 6 | 力制御開始時からの力制御座標系での手先位置の変位量のマイナスピーク(指令値)[mm] | 力制御開始時からの力制御座標系での手先位置の変位量のマイナスピーク(指令値)[deg] |
| 7 | 力制御開始時からの力制御座標系での手先位置の変位量(現在値)[mm] | 力制御開始時からの力制御座標系での手先位置の変位量(現在値)[deg] |
| 8 | 力制御開始時からの力制御座標系での手先位置の変位量のプラスピーク(現在値)[mm] | 力制御開始時からの力制御座標系での手先位置の変位量のプラスピーク(現在値)[deg] |
| 9 | 力制御開始時からの力制御座標系での手先位置の変位量のマイナスピーク(現在値)[mm] | 力制御開始時からの力制御座標系での手先位置の変位量のマイナスピーク(現在値)[deg] |
| 10 | 力制御開始時からの力制御座標系での指令値と力制御指令値の偏差[mm] | 力制御開始時からの力制御座標系での指令値と力制御指令値の偏差[deg] |
| 11 | 力制御開始時からの力制御座標系での指令値と力制御指令値の偏差のプラスピーク[mm] | 力制御開始時からの力制御座標系での指令値と力制御指令値の偏差のプラスピーク[deg] |
| 12 | 力制御開始時からの力制御座標系での指令値と力制御指令値の偏差マイナスピーク[mm] | 力制御開始時からの力制御座標系での指令値と力制御指令値の偏差マイナスピーク[deg] |
| 13 | センサ値の力[N] | センサ値のモーメント[Nm] |
| 14 | センサ値の力のプラスピーク[N] | センサ値のモーメントのプラスピーク[Nm] |
| 15 | センサ値の力のマイナスピーク[N] | センサ値のモーメントのマイナスピーク[Nm] |
注意事項
-
ID : 7395