
ID : 5487
パラメータの設定
パラメータの設定方法を説明します。
パラメータ設定の手順
1 詳細設定画面表示
「トラッキング」画面で[F12 詳細]を押します。
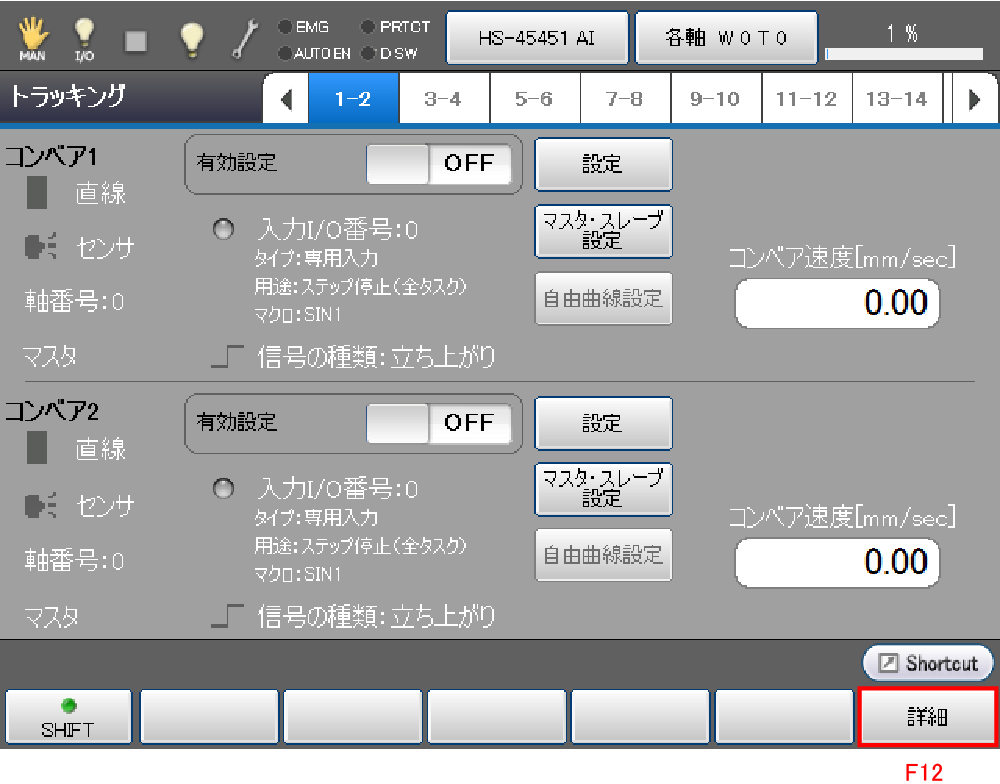
「コンベアトラッキング」画面が表示されます。
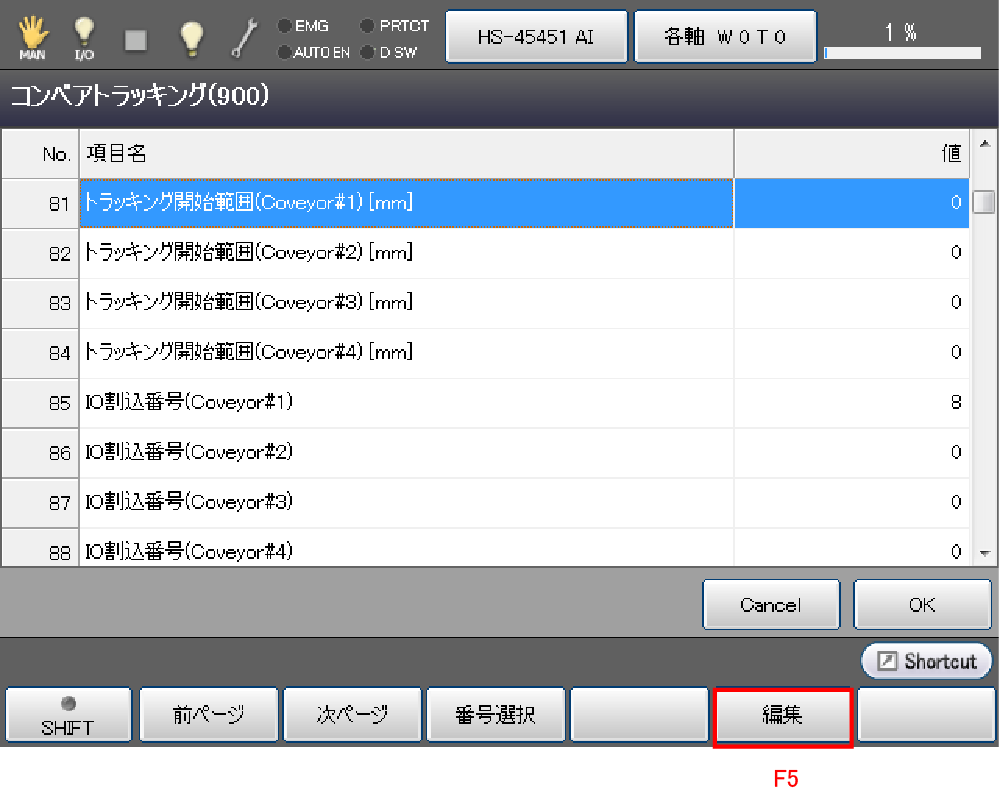
2 設定項目選択
設定する項目名を選択して、[F5 編集]を押します。
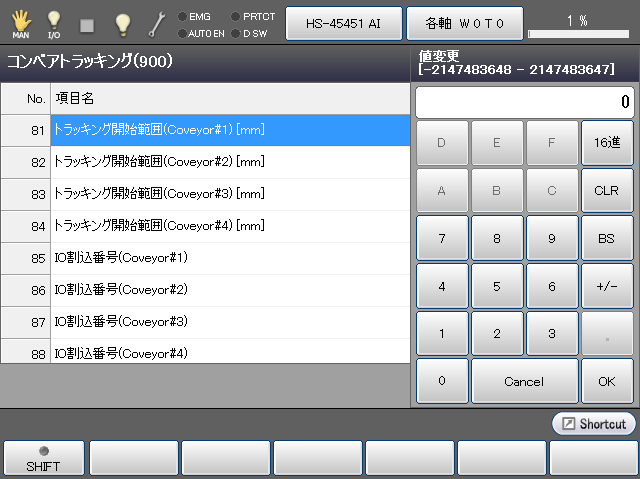
3 設定値変更
テンキーを使ってパラメータ値を入力し、「OK」を押します。
パラメータ一覧
「詳細」画面のパラメータで、自動設定されないパラメータ詳細を以下に示します。
| 項目名 | 内容 |
|---|---|
| トラッキング開始範囲 | 「用語と定義」の該当項目参照のこと。 上流方向にオフセットする場合、負値で設定します。 |
| 最小ワーク間隔(センサ) | トラッキングバッファ内に存在するワークと重複するデータを TrackSetSensorコマンドで登録しないようにするための閾値です。 |
| エンコーダ値LPE時定数 | エンコーダからの入力値にフィルタをかけて急激な値の変動を抑制します。 値を大きくしすぎると、入力値の変動に対する応答性が下がります。 |
| 速度比例ゲイン | コンベアの速度を上げた際に、ロボットの追従精度が悪化する場合に使用します。 ロボットがワークに追いつけない場合は、値を1より大きくしてください。 ロボットがワークを追い越す場合は、値を1よりも小さくしてください。 |
| 定常偏差調整量 | ワークに対してロボットが常に一定量ずれて追従する場合に使用します。 ロボットがワークに追いつけない場合は、正の値[mm]で指定します。 ロボットがワークを追い越す場合は、負の値[mm]で指定します。 |
ID : 5487