
ID : 5339
キャリブレーション実施手順
キャリブレーションは以下の順で実施します。
1 キャリブレーション手順の確認
キャリブレーションの手順を確認後、[次へ]を押します。
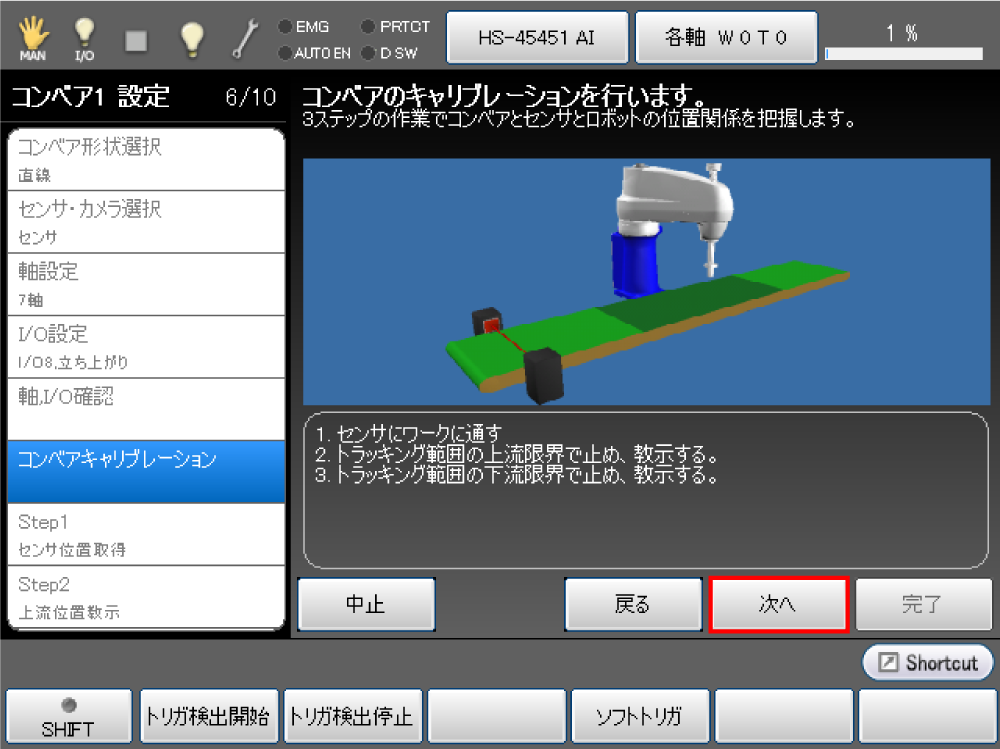
2 センサ通過確認
ワークをセンサに通します。
ワークがセンサを通過する時に、トラッキングバッファにエンコーダ値が積まれたことを確認し、よければ[次へ]を押します。
トリガ信号が入力されたタイミングのエンコーダ値がトラッキングバッファに保存されます。

3 トラッキング範囲上流限界の教示
トラッキング範囲の上流側の限界位置でワークを止め、ロボットをワーク上へ移動し、[上流限界の位置取込]を押します。
ロボット位置が取り込まれます。
取り込まれた値を確認し、よければ[次へ]を押します。
- ロボット位置の取り込みを再度行なう場合は、位置を取り込むかのシステムメッセージが表示されます。
- 上流限界の位置取り込みを行った時の姿勢が、ワーク把持基本姿勢になります。
- トラッキング動作時の把持高さは、上流限界と下流限界で取り込んだ位置の中点の高さになります。
編集ボタンを押すと位置の座標を変更することができます。
コンベア上流と下流の位置取込の座標とその時取得されたエンコーダ値を用いて、コンベアの送り量と方向を計算しています。したがって、コンベアの送り量と方向に影響が出ることを考慮したうえで座標の値を編集してください。

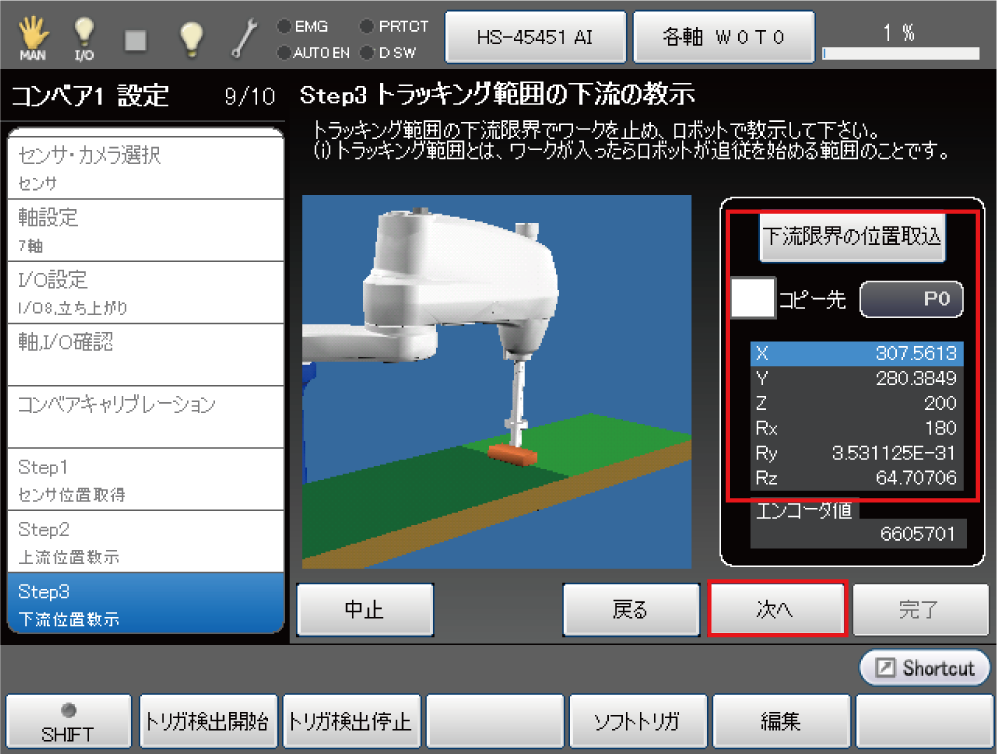
4 トラッキング範囲下流限界の教示
トラッキング範囲の下流側の限界位置でワークを止め、ロボットをワーク上へ移動し、[下流限界の位置取込]を押します。
ロボット位置が取り込まれます。
取り込まれた値を確認し、よければ[次へ]を押します。
上流限界の位置と下流限界の位置の中点位置が、コンベア基準位置になります。
5 キャリブレーション結果の確認
算出したパラメータ値が表示されますので、内容を確認し、[完了]を押します。
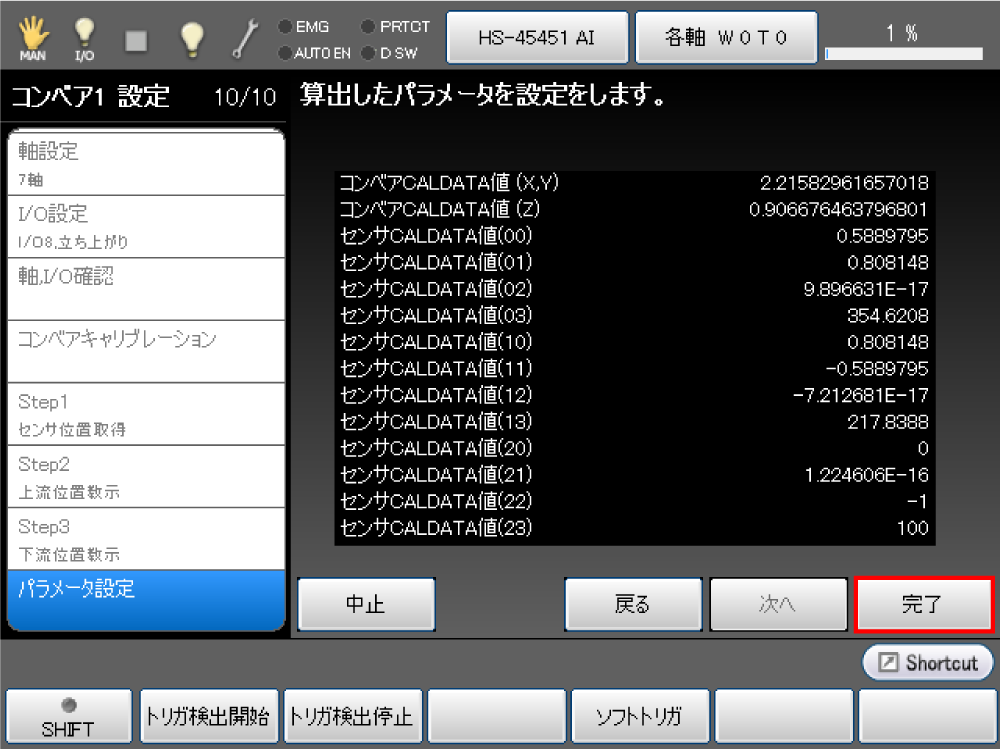
完了ボタンを押した後、パラメータ設定処理が行われます。付加軸トラッキングではモータON状態では処理が行われません。システムメッセージ「モータOFFしてください。」と表示されます。
6 キャリブレーション結果の反映
計算したデータをコントローラに設定するかのシステムメッセージが表示されますので、よければ[OK]を押します。
計算したデータがコントローラに設定されます。
[Cancel]を押すと、設定は実行されません。
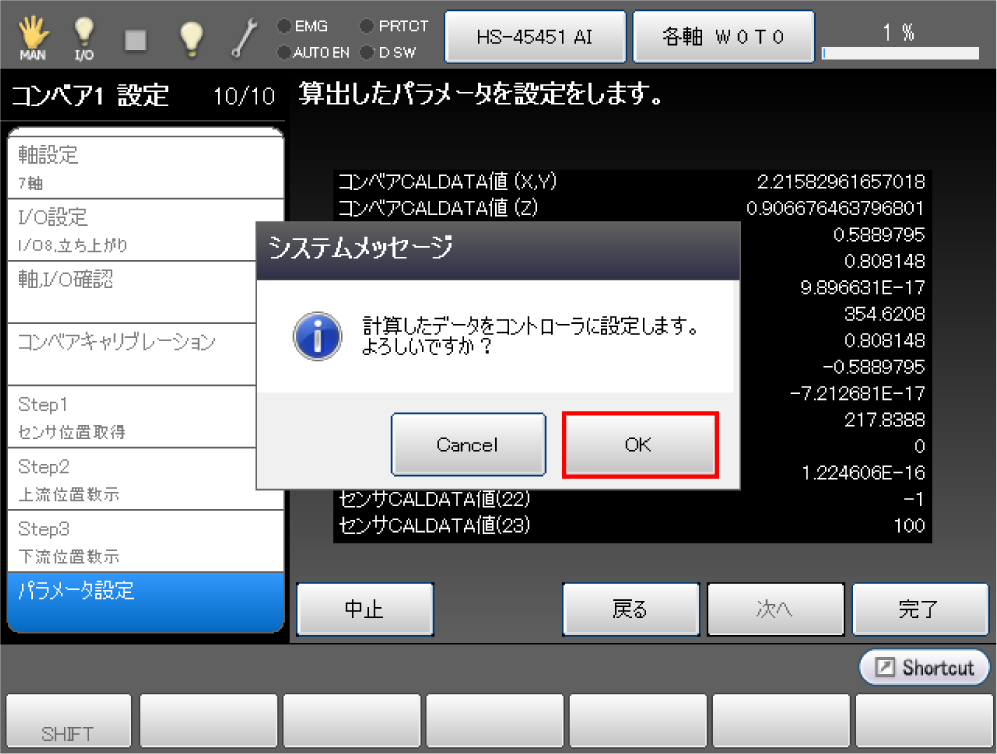
設定が保存され、「トラッキング」画面に戻ります。
コンベア1台、ロボット1台の時のセットアップは以上で終了となります。
ID : 5339