
ID : 3062
負荷重心イナーシャ自動測定
ここではHSR、HSA1ロボットを例に手順を説明します。
「先端負荷質量」、「負荷重心位置」を先に設定してください。
1
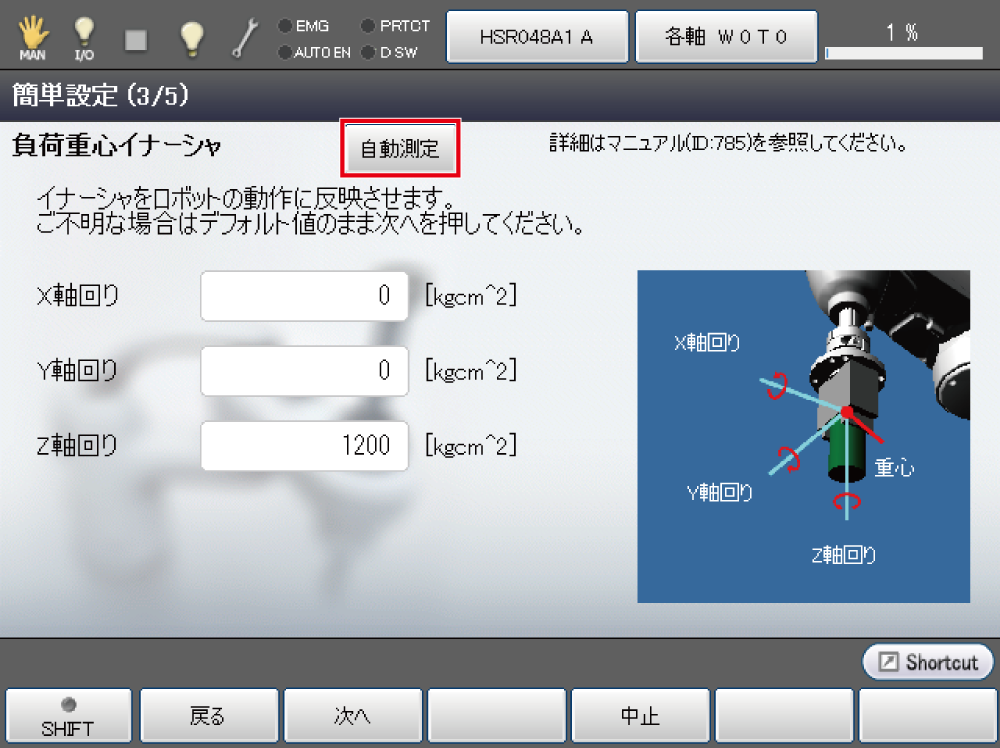
[簡単設定] - [負荷重心イナーシャ]設定画面にある[自動測定]ボタンを押します。
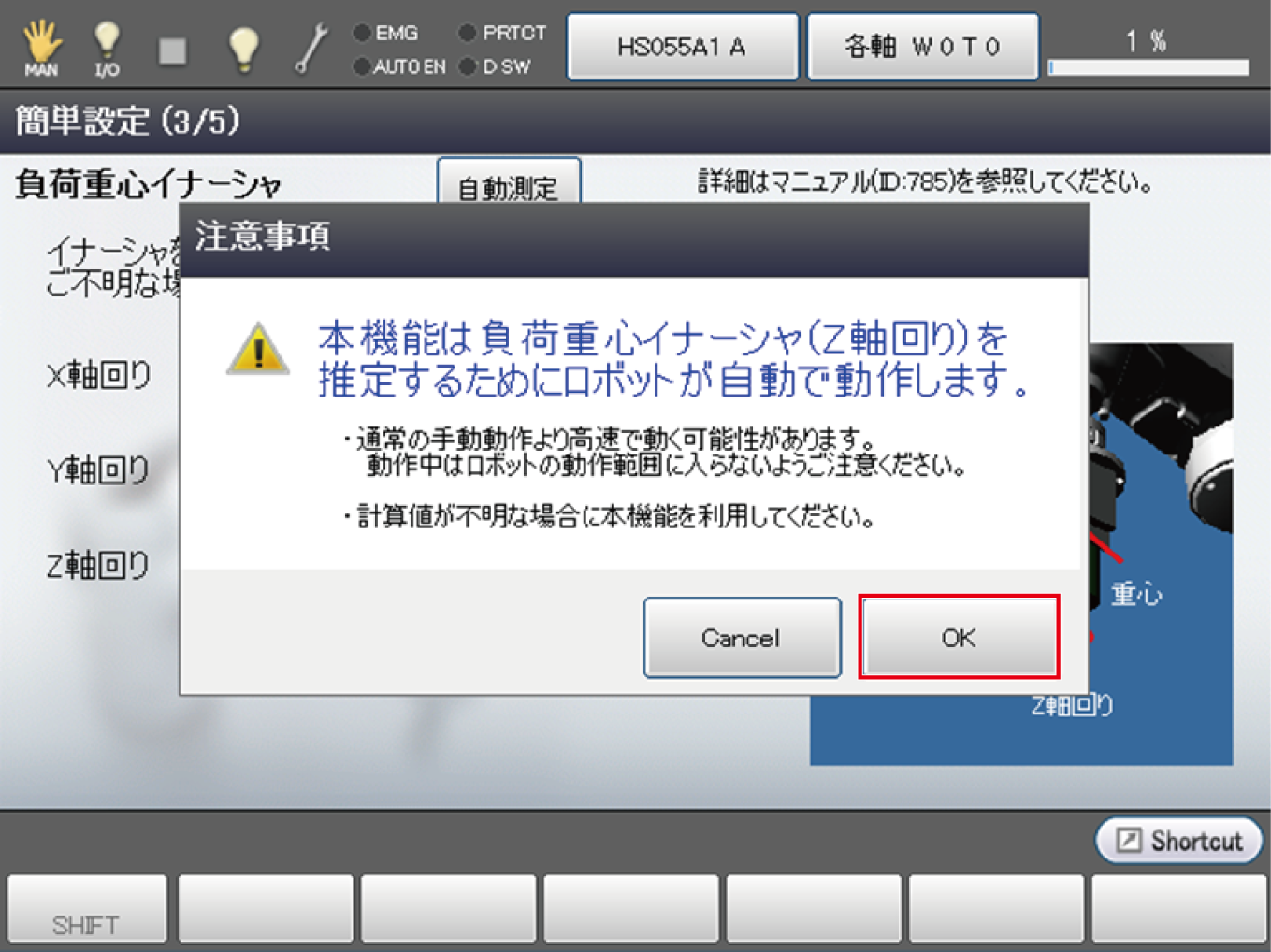
負荷重心イナーシャ推定画面にはロボットがどのように動作するかと、測定時の注意事項が表示されます。
確認後、[OK]ボタンを押します。
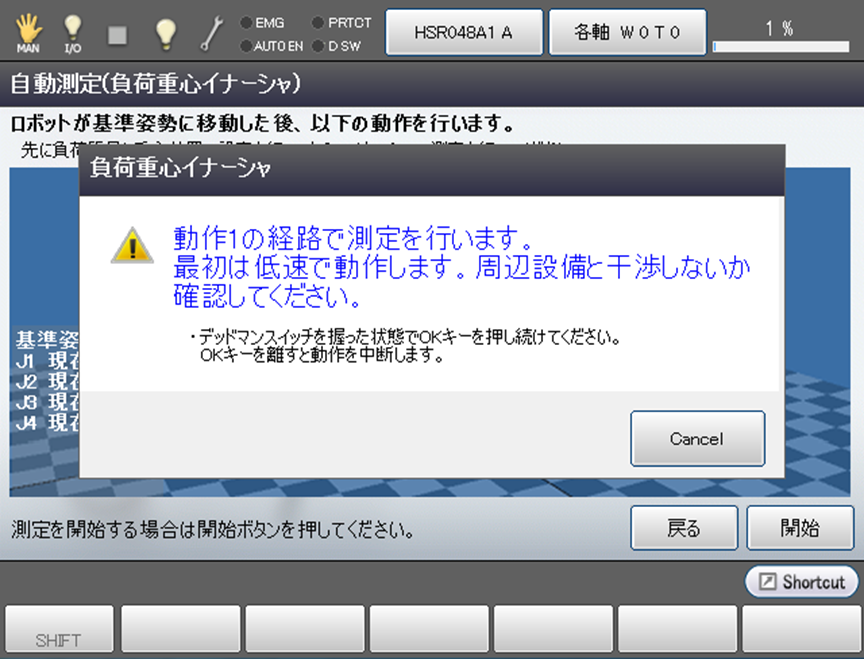
自動測定画面が表示されます。
[開始]ボタンを押します。

2
デッドマンスイッチを押しながら、[MOTOR]キーを押してモータをONにし、OKキーを押し続けます。
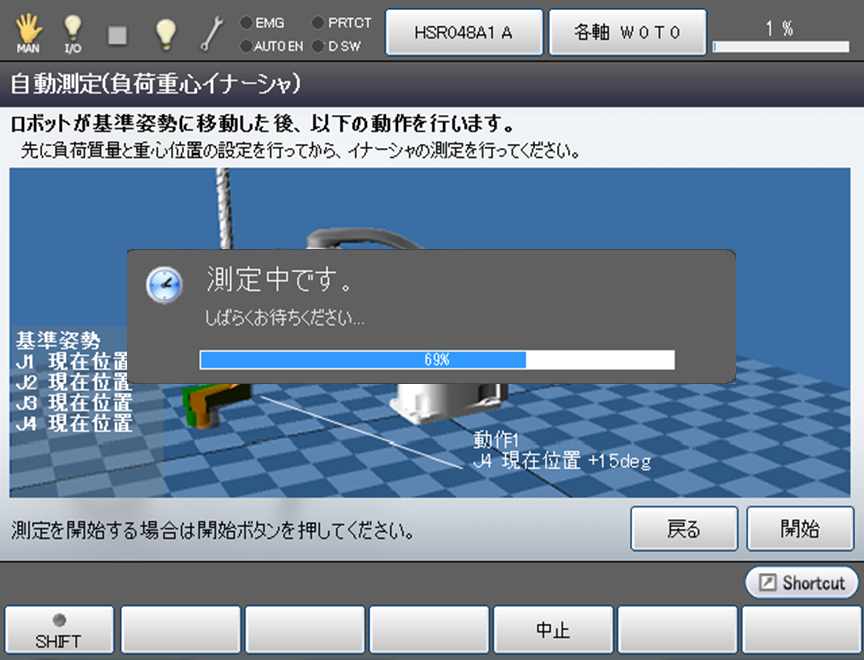
低速動作の測定が実行されます。
- ハンド等が設備と干渉しないことを確認してください。
- 通常の手動動作よりも高速動作することがありますので、ロボットの動作範囲に近づかないでください。
(実行中の画面)
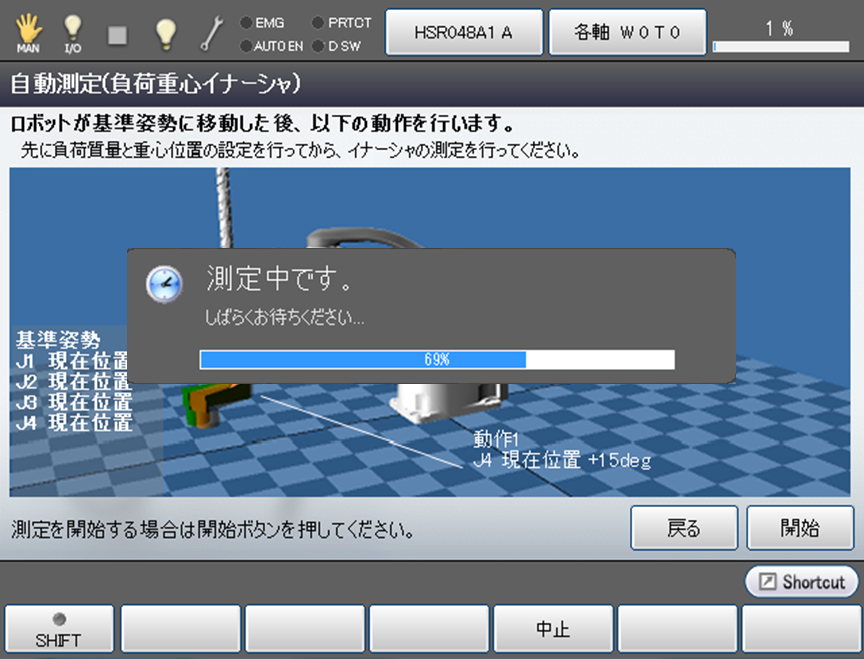
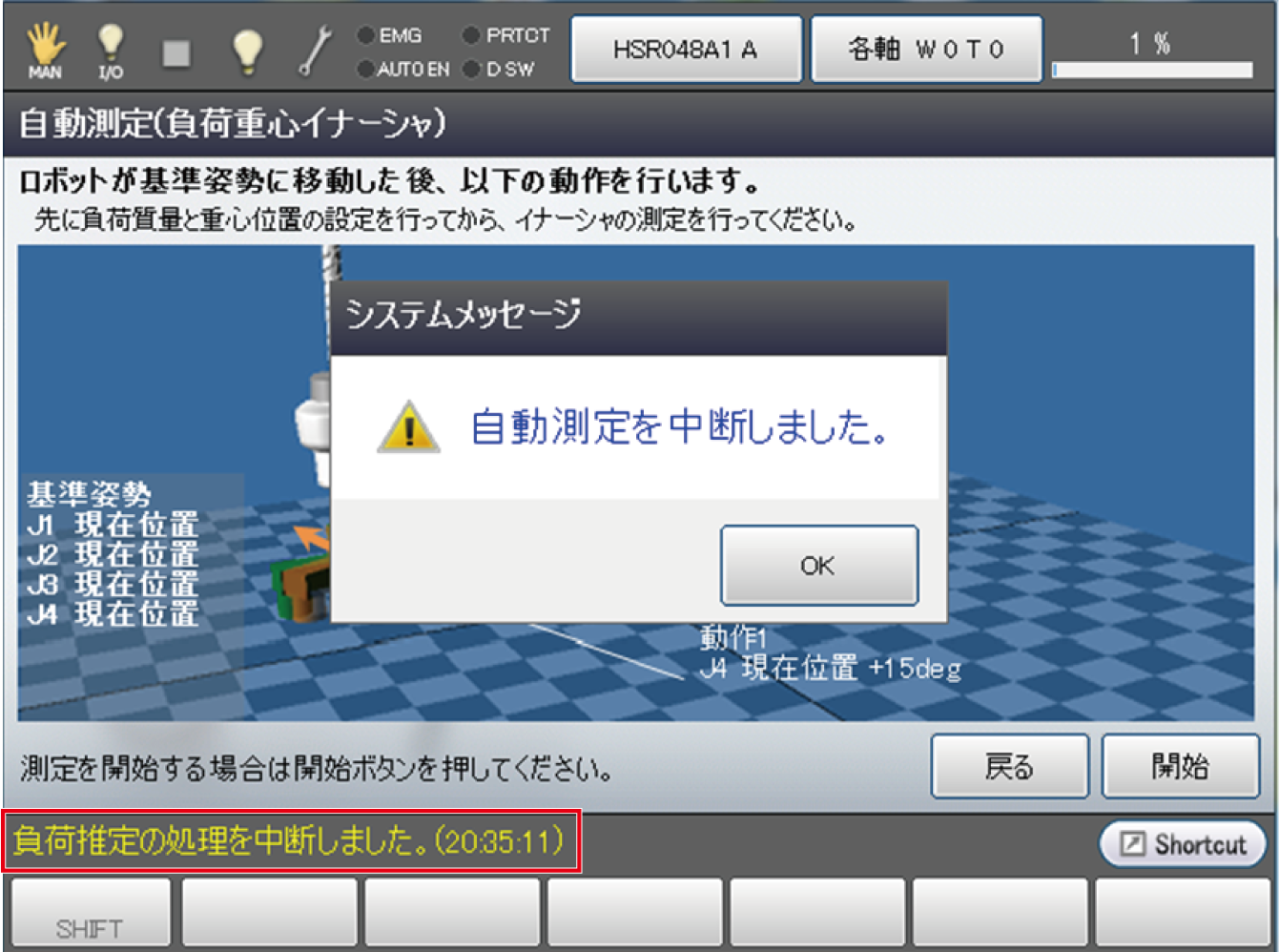
測定が完了するまで、デッドマンスイッチとOKキーを押し続けます。
測定中にデッドマンスイッチ、もしくはOKキーを離すと測定は中断されます。
3
低速動作の測定が完了すると、高速動作の自動測定が実行されます。
デッドマンスイッチとOKキーを押し続けます。
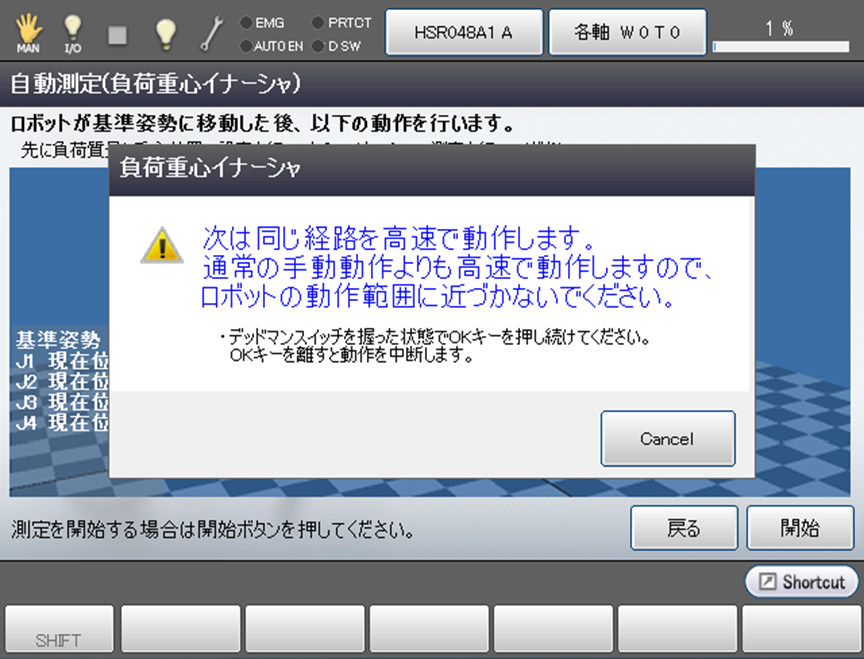
ロボットが高速で動作するため、ロボットの動作範囲内に入らないでください。
(実行中の画面)
4
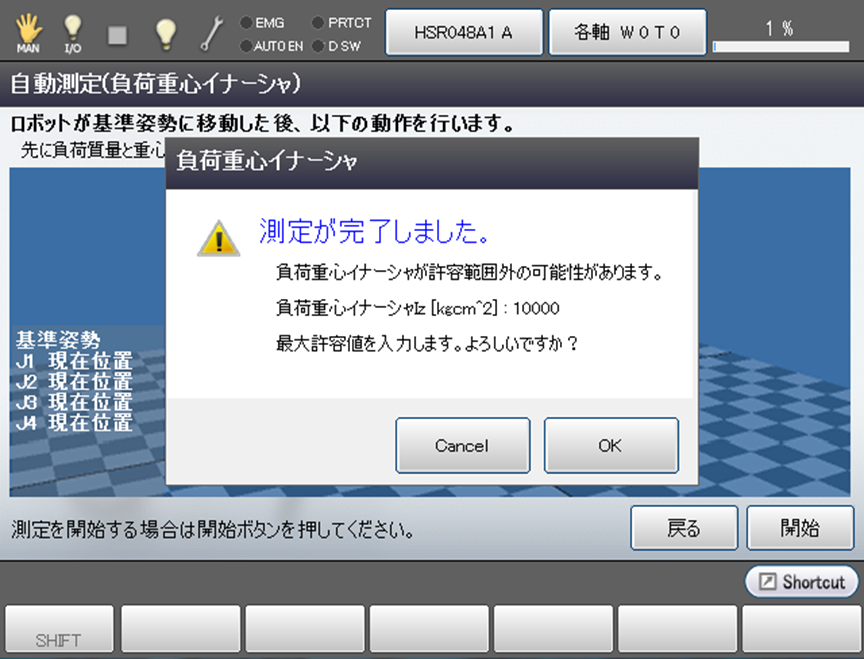
測定値が最大許容範囲内の場合、測定が完了となります。
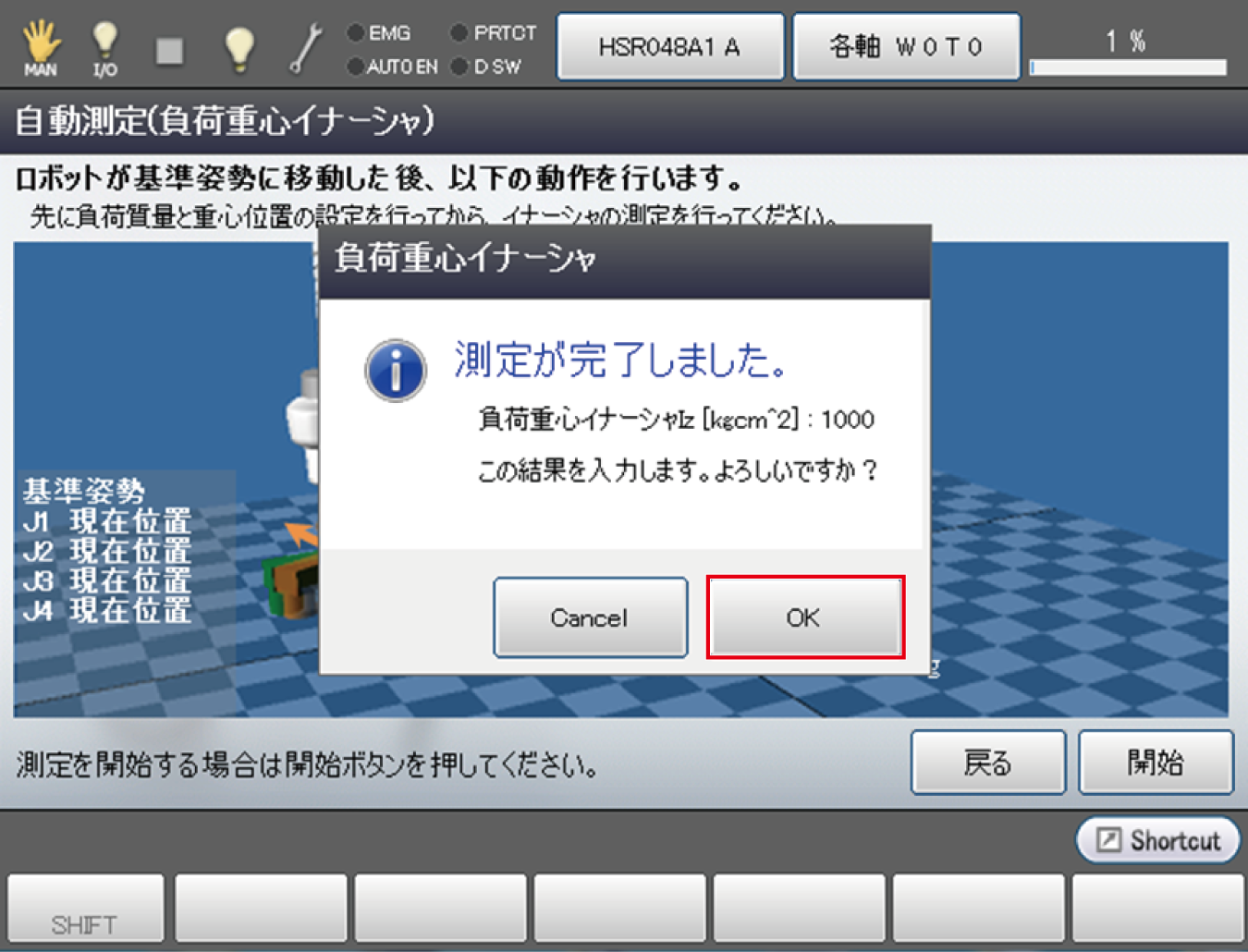
[OK]ボタンを押すと、[簡単設定]画面に戻ります。この際、測定値が自動的に入力されます。
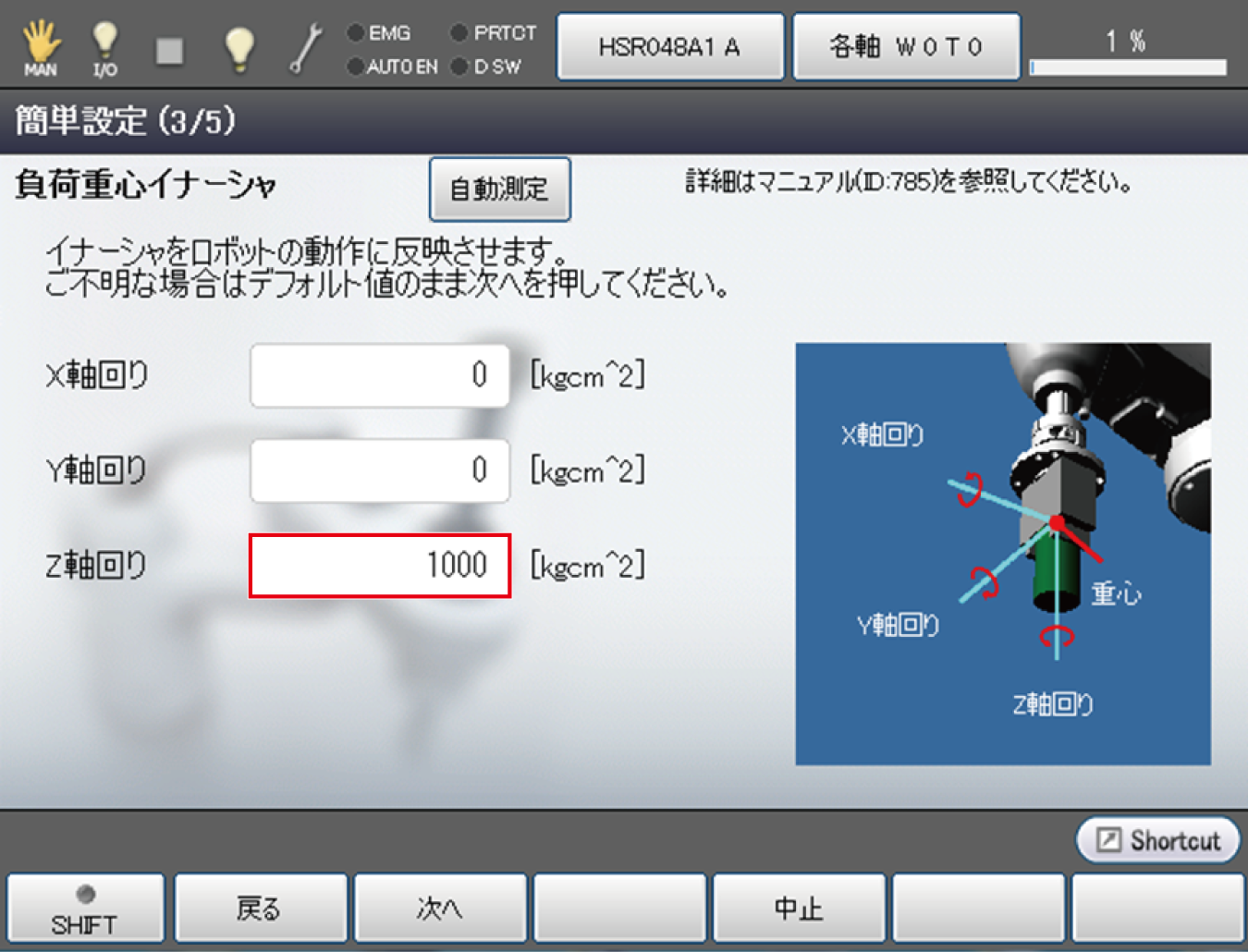
| 1 | HSR、HSA1ではX軸回り、Y軸回りの値は推定しませんので、必要に応じて直接値を入力してください。 |
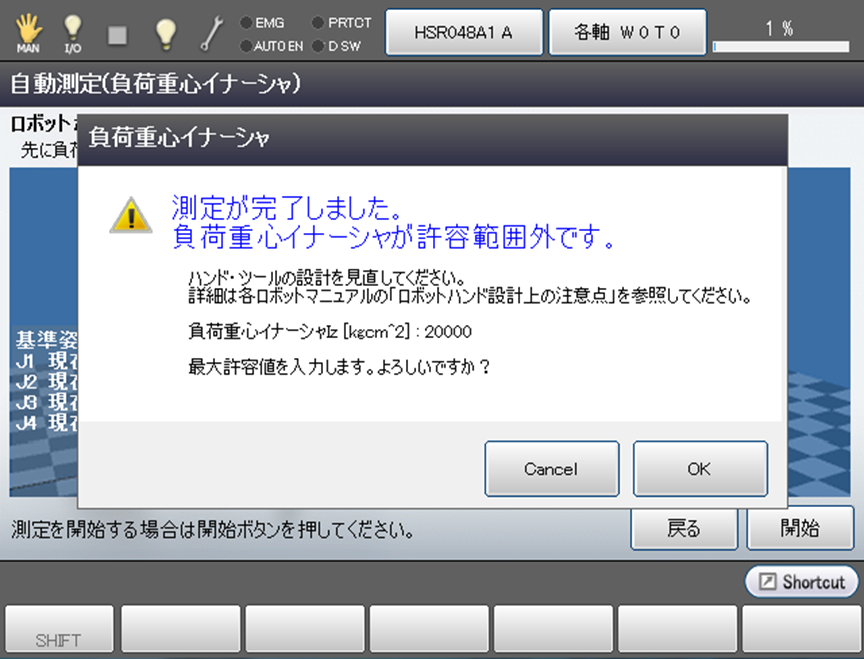
| 2 | 最大許容範囲が外れた場合は、下記のようなメッセージが表示されます。
|
| 3 | 自動測定画面で「Cancel」を押して[簡単設定] - [先端負荷質量]設定画面に戻った場合、測定値は入力されないので注意してください。 |
ID : 3062