
ID : 2987
MC_ReadAxesGroup
ロボットコントローラから、ロボットの動作状況などの情報を取得し、データブロック"DB_DENSO_ROBOTS (DB2990)"の中の、変数"Robots[n]"に格納します。
| グラフィック表示 | FB番号 | FBカテゴリ |
|---|---|---|
 |
FB2301 | 特殊 |
入力パラメータ
| パラメータ名 | データ型 | 有効範囲 | 初期値 | 省略 |
|---|---|---|---|---|
| AxesGroup | Int | 1以上 | 1 | 不可 |
|
||||
| InAddress | HW_IO | - | - | 不可 |
|
||||
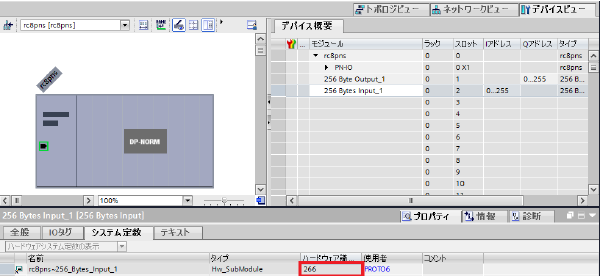
ハードウェア識別子について
ハードウェア識別子は、CPU(PLC)のハードウェアコンフィグレーションを"TIA Portal V14"で行ったときに、"TIA Portal V14"が各デバイスに自動的に割り付ける番号です。
ロボットコントローラの入力データは、PROFINET IOの入力モジュールとして設定するので、その入力モジュールのハードウェア識別子を、入力パラメータ"InAddress"に指定します。
例えば、下図のような設定の場合、入力パラメータ"InAddress"には"266"を指定します。
出力パラメータ
-
機能説明
実際には、データブロック"DB_DENSO_ROBOTS (DB2990)"の中の、変数"Robots[n]"の中にある変数"Status"に、ロボットコントローラの情報を格納します。
注意事項
このFBで更新した変数"Status"(*1) の値は、Command-Slaveの他のFBで、ロボットを制御するために使用されます。変数"Status"の値が古いと、Command-Slaveの他のFBで正しくロボットを制御できない可能性があります。
したがって、このFBはプログラムの先頭に配置し、入力パラメータ"EN"を常にTRUEにしてください。
*1 : 変数"Status"は、データブロック"DB_DENSO_ROBOTS (DB2990)"の中の、変数"Robots[n]"の中にある変数。
ID : 2987