
ID : 2988
MC_WriteAxesGroup
データブロック"DB_DENSO_ROBOTS (DB2990)"の中の、変数"Robots[n]"の内容を、ロボットコントローラに送信します。
また、ロボットコントローラの外部速度を変更します。
| グラフィック表示 | FB番号 | FBカテゴリ |
|---|---|---|
 |
FB2302 | 特殊 |
入力パラメータ
| パラメータ名 | データ型 | 有効範囲 | 初期値 | 省略 |
|---|---|---|---|---|
| AxesGroup | Int | 1以上 | 1 | 不可 |
|
||||
| OutAddress | HW_IO | - | - | 不可 |
|
||||
| Override | Int | 1 ~ 100 | 1.0 | 可能 |
|
||||
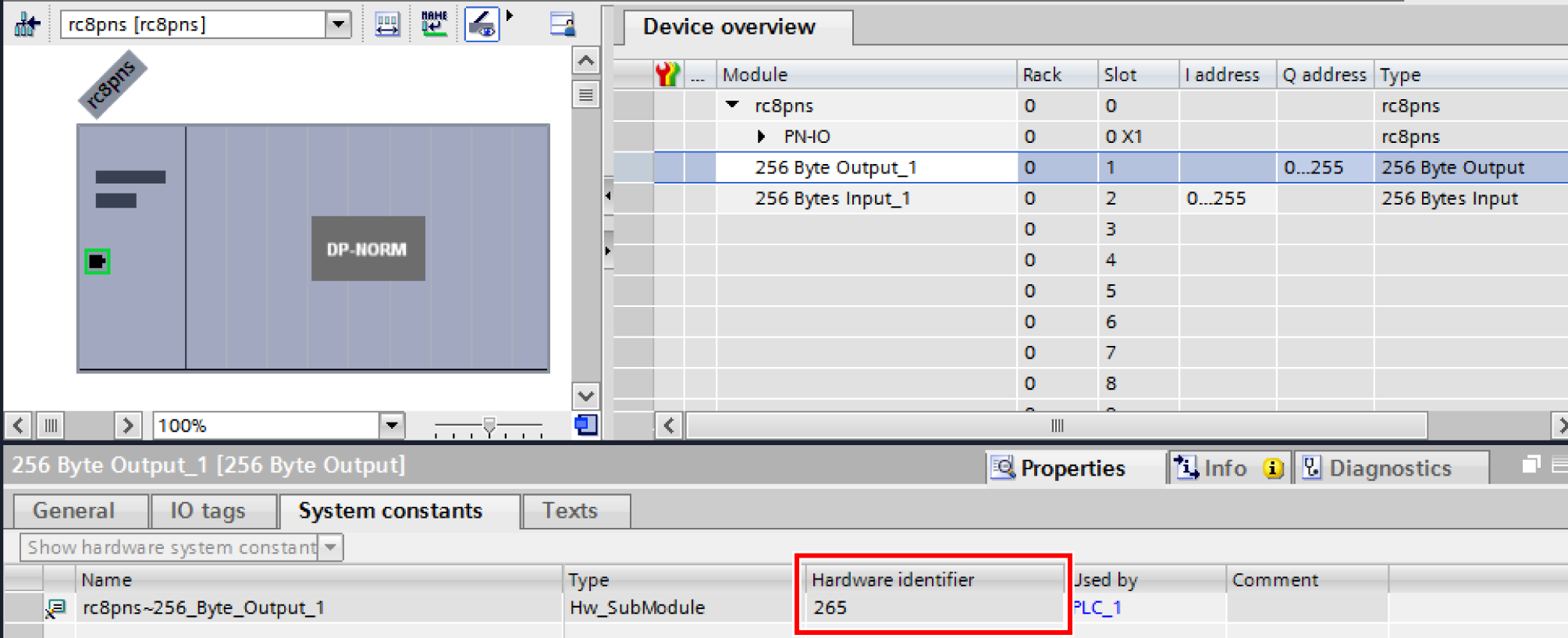
ハードウェア識別子について
ハードウェア識別子は、CPU(PLC)のハードウェアフィグレーションを"TIA Portal V14"で行ったときに、"TIA Portal V14"が各デバイスに自動的に割り付ける番号です。
ロボットコントローラへの出力データは、PROFINET IOの出力モジュールとして設定するので、その出力モジュールのハードウェア識別子を、入力パラメータ"OutAddress"に指定します。
例えば、下図のような設定の場合、入力パラメータ"OutAddress"には"265"を指定します。
出力パラメータ
| パラメータ名 | データ型 / 説明 |
|---|---|
| Error | Bool |
|
|
| ErrorID | Word |
|
|
| ErrorIDEx | DWord |
|
機能説明
実際には、データブロック"DB_DENSO_ROBOTS (DB2990)"の中の、変数"Robots[n]"の中にある、変数"Cmd"を、ロボットコントローラへ送信します。
注意事項
Command-Slaveの他のFBで更新された、変数"Cmd"(*1) の値は、このFBでロボットコントローラに送信します。変数"Cmd"の値がロボットコントローラに送信されないと、ロボットを制御できません。
したがって、このFBはプログラムの最後に配置し、入力パラメータ"EN"を常にTRUEにしてください。
*1 : 変数"Cmd"は、データブロック"DB_DENSO_ROBOTS (DB2990)"の中の、変数"Robots[n]"の中にある変数。
ID : 2988