
ID : 2024
協調用プロジェクトの一括送受信
協調システム全体のコントローラを対象として、一括してデータ送受信を行います。
- WINCAPSIIIを起動しているPC、マスタ/スレーブコントローラがすべてネットワークで接続されている必要があります。
ネットワークの構成については「ロボットコントローラどうしの通信方法」を参照してください。 -
一括送受信は、パラメータを含む全データを送受信します。変数の使用個数やIOタイプが実機と一致していることを確認後、実行してください。
1
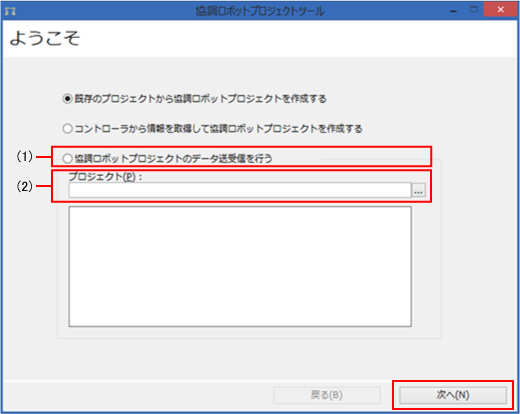
(1)「協調ロボットプロジェクトのデータ送受信を行う」を選択し、(2)マスタロボットのプロジェクトを指定します。
指定後、[次へ]ボタンを押します。
2
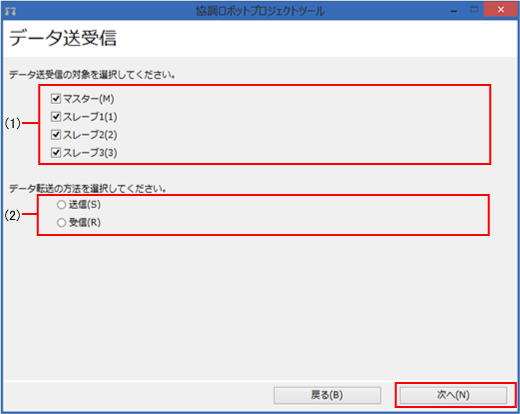
(1)データ送受信の対象ロボットを選択し、(2)送信(PC → RC8シリーズ)、または受信(RC8シリーズ → PC) を選択します。
指定後、[次へ]ボタンを押します。
3
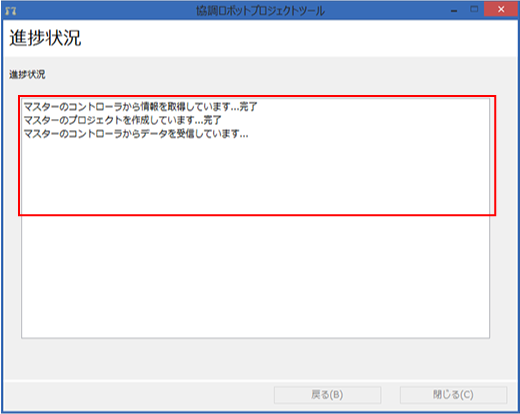
進捗状態が表示されます。
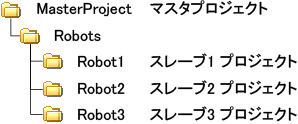
スレーブロボットのプロジェクトは、マスタロボットのフォルダ内に作成されます。
4
[OK]ボタンでウインドウを閉じます。
ID : 2024