
ID : 2011
複数ロボットの変数移動
複数のロボットを同時にそれぞれの変数位置に移動させる方法を説明します。
「変数指定移動」画面まではリーダロボットの変数移動のSTEP1~2と同じです。
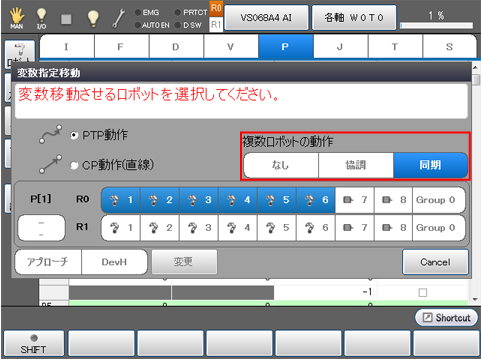
3
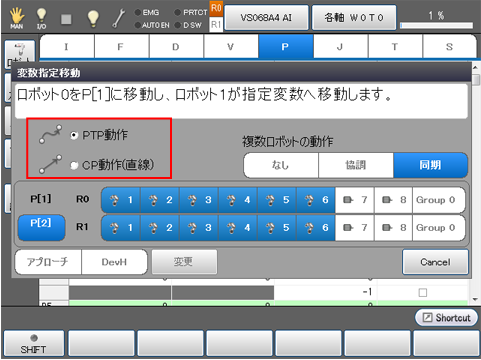
複数ロボットの動作を"同期"にします。
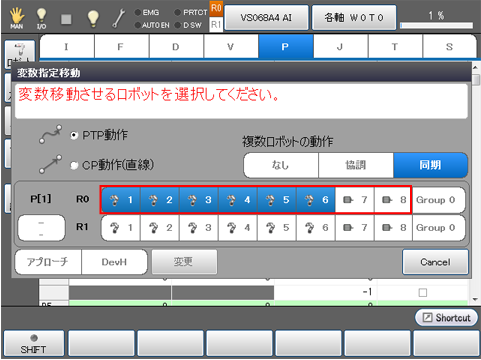
4
リーダロボットの移動させる軸(ロボット軸、付加軸)を選択します。
5
2台目のロボットの移動させる軸(ロボット軸、付加軸)を選択、あるいは変数番号の空欄位置を押します。
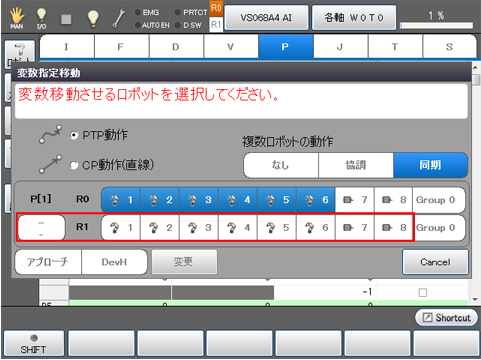
フォロワに指定していないロボットも変数移動で同期動作させることができます。
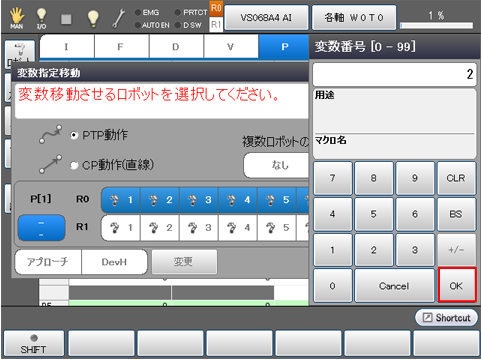
6
テンキーが表示されますので、変数番号を入力してOKを押します。
7
補間方法を選択します。
8
ペンダントのデッドマンスイッチとOKキーを押してロボットを移動させます。
オプション機能
「変数指定移動」画面の「アプローチ」ボタンでアプローチ距離を指定すると、すべてのロボットが指定したアプローチ長の位置に移動します。「DevH」ボタンで座標(X、,Y、Z、Rx、Ry、Rz)を指定すると、すべてのロボットが変数位置から指定した座標分オフセットした位置に移動します。
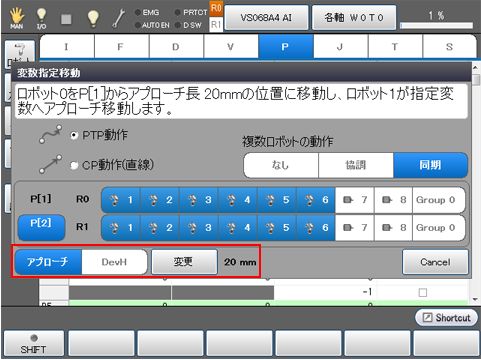
アプローチ距離、あるいは座標(X、,Y、Z、Rx、Ry、Rz)が既に設定してある場合は、「変更」ボタンで値を変更することができます。
いずれのロボットもロボット軸が選択されていないときは、アプローチ移動、DevH移動はできません。
ID : 2011