
ID : 2010
リーダロボットの変数移動
リーダロボットを指定した変数位置に移動させる方法を説明します。
1
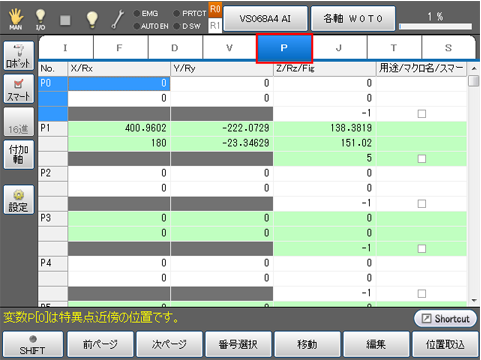
操作経路:基本画面 - [F3 変数]
「変数」画面で変数タイプを選択します。画面内の[P変数タブ]を押します。
2
移動したい変数を選択して[F4 移動]を押します。
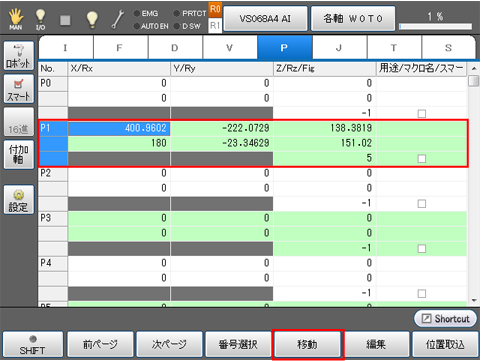
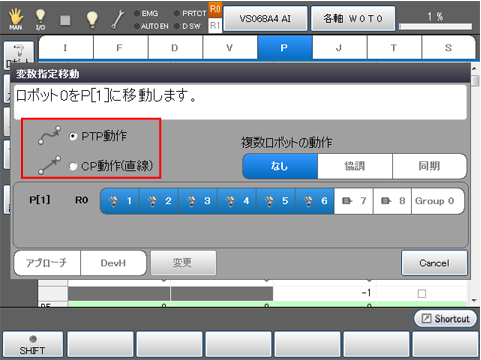
「変数指定移動」画面が表示されます。
3
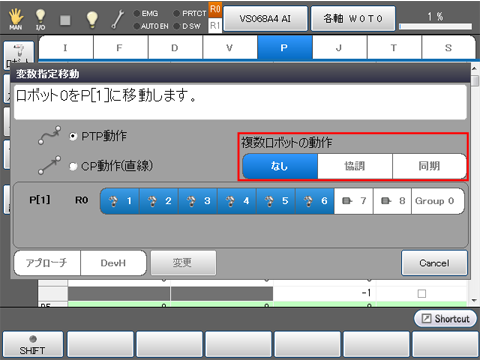
複数ロボットの動作を"なし"にします。
4
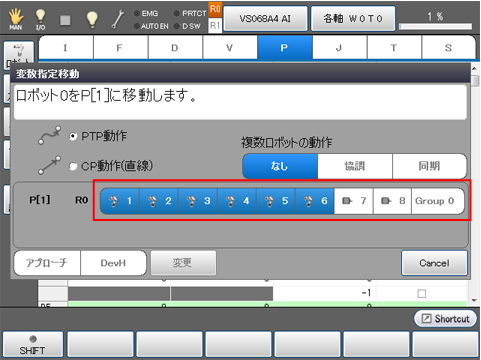
移動させる軸(ロボット軸、付加軸)を選択します。
5
補間方法を選択します。
6
ペンダントのデッドマンスイッチとOKキーを押してロボットを移動させます。
オプション機能
「変数指定移動」画面の「アプローチ」ボタンでアプローチ距離を指定すると、指定したアプローチ長の位置に移動します。「DevH」ボタンで座標(X、,Y、Z、Rx、Ry、Rz)を指定すると、変数位置から指定した座標分オフセットした位置に移動します。
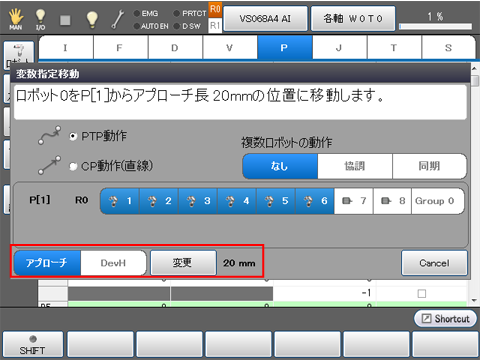
アプローチ距離、あるいは座標(X、,Y、Z、Rx、Ry、Rz)が既に設定してある場合は、「変更」ボタンで値を変更することができます。
付加軸のみが選択されているときは、アプローチ移動、DevH移動はできません。
ID : 2010