
ID : 1632
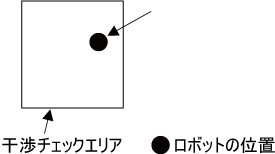
干渉チェックエリアからの回避方法
エリア内に入ったとき
エリア設定の干渉時エラー設定が"1"、"2"の場合は、ロボットが干渉チェックエリア内に入ったとき、エラー「ツール先端がエリア*と干渉しました」(エラーコード:0x83201281~0x832012A0)が発生します。
干渉時エラー設定が"2"の場合は、以下の可能操作に限りティーチングペンダント、ミニペンダントでロボットを操作することができ、干渉チェックエリア外に回避する事ができます。
|
モード |
操作 |
||||
|---|---|---|---|---|---|
| モータON | 手動キー | 変数移動 | モータLOCK | ダイレクト | |
| 手動 | 可能 | 可能 | 不可 | 可能 | 不可 |
| ティーチチェック | 不可 | 不可 | 不可 | ||
| 自動 | 不可 | 不可 | |||
回避手順
1
ロボットが干渉チェックエリアに侵入しエラーが発生する。
2
自動イネーブルSWをOFFにしてモードを手動モードにする。
3
干渉チェックエリア外までロボットを操作する。
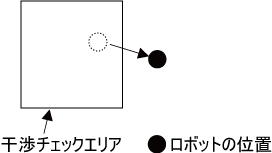
- 干渉物が有る方向にも動作可能なので干渉物がない方向に操作してください。
- 再び干渉チェックエリアに入った場合は、エラー「ツール先端がエリア*と干渉しました」(エラーコード:0x83201281~0x832012A0)が発生します。
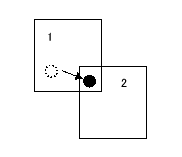
- 下図の用に干渉チェックエリアが重なっていた場合、エリア1から動作し始めてエリア2に入ったところでエラーが発生します。この場合もエラー発生後、前述の回避操作を行えば回避できます。
エリア外に出たとき
上記「エリア内に入ったとき」と同様の対応ができます。
エリア設定の干渉時エラー設定が"4"、"5"の場合は、ロボットが干渉チェックエリア外に出たとき、エラー「ツール先端がエリア*と干渉しました」(エラーコード:0x83201281~0x832012A0)が発生します。
干渉時エラー設定が"5"の場合は、上記の干渉時エラー設定が"2"の場合と同様の操作ができ、干渉チェックエリア内に回避する事ができます。
回避手順は上記を参考にしてください。ただし、動作の内外方向は逆になります。
ID : 1632