
ID : 1612
パス動作再起動時の軌跡変更
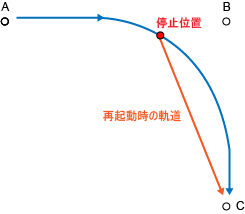
パス動作中に停止処理が行われた場合、再起動によってロボットが動作する軌跡を以下の2つから選択することができます。
- パス動作開始後の目標位置への動作を実行する。
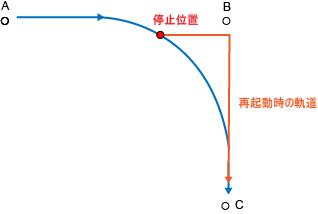
- パス開始後の軌道上へのエンド動作後、パス開始後の目標位置への動作を実行する。
軌跡変更方法
パス動作再起動時の軌跡の変更は、使用条件パラメータの"再起動時のパス動作継続設定"を変更することで行います。
パス動作開始前の目標位置付近を通過するかどうかの判定値設定
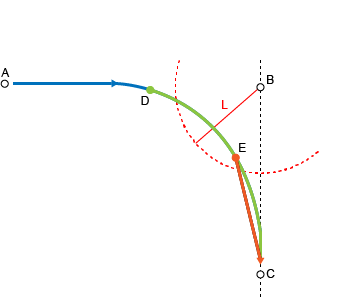
パス動作開始前の目標位置付近を通過する設定にした場合でも、パス動作中に停止した位置によって、パス動作開始後の目標位置に動作するようにすることができます。
設定項目はパス動作開始前の目標位置から停止位置までの距離です。例えばその距離をLとします。図のようにAからBへの直線動作とBからCへの直線動作をパス動作させた場合、停止位置がDなら再起動によってBへ向かう動作を行いますが、停止位置がEならBへ向かう動作は行わず、直接Cへ動作します。
このLの変更は、使用条件パラメータの"パス動作完了範囲"を変更することによって行います。単位はmmです。変更方法は使用条件パラメータの"再起動時のパス動作継続設定"と同じです。
注意事項
設定値はおおよその範囲を示すもので、絶対位置を保証するものではありません。
数値を変更した場合でも動作速度や補間方法によって実際の動作が変化しない場合もあります。
ID : 1612