
ID : 1611
パス開始変位
パス開始変位を「@P」で指定
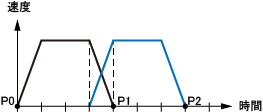
パス開始変位を「@P」で指定すると、それまでの動作の減速開始と同時に次の動作を開始します。したがって、下図に示すように、パス開始位置とパス通過点"P1"との距離"L"は、速度・加速度により変化します。
Move L, @P P1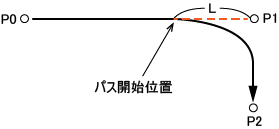 |
パス開始変位を「@数値」で指定
パス開始変位を「@数値」で指定すると、おおよそ数値=L(mm)の位置からパス動作を開始します。
注意事項
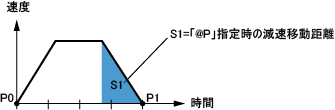
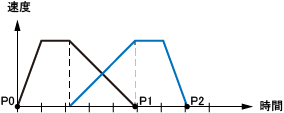
「@数値」で指定する値が、「@P」で指定した際の減速移動距離を超える場合
下図に示すように、減速開始位置が修正されます。
したがって、「@数値」で指定した場合、減速度が低下し、移動時間が長くなる場合があります。
「@P」で指定 |
 |
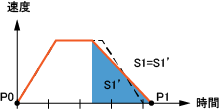
「@数値(x)」を x > S1 で指定 |
減速度が低下し、到達までの移動時間が長くなります。 |
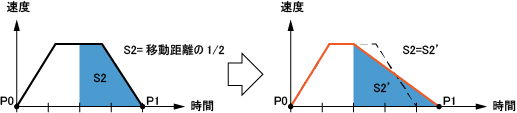
「@数値」で指定する値が、移動距離の1/2を超える場合
下図に示すように、減速開始位置は移動距離の1/2に固定されます。
したがって、x > S2 の場合、x を変えてもパス動作は変化しません。
「@数値(x)」を x > S2 で指定 |
"x"の値がS2を超える場合は、減速開始位置が移動距離の1/2に固定されます。 |
x > S2 の場合、「パス開始変位量を再設定して下さい」のワーニングがティーチングペンダントに表示されます。
加速時間について
減速開始位置が変化する場合、次の軌道の加速時間も修正されます。
下図に示すように、「@P」指定の場合に比べ、次の軌道の動作時間が長くなる場合があります。
「@P」で指定 Move L, @P P1 |
 |
減速開始位置が変化する場合Move L, @[x] P1 |
 |
次の動作が三角パターンの場合
三角パターンとは、加速を開始して定速になる前に減速が始まる場合をいいます。
その場合、「@数値」で指定した位置よりパス通過点に近い位置からパス動作を開始します。
特に、低速動作から高速動作になる際にパス動作させると、パス動作開始位置が変動しやすくなります。パス動作時は、パス動作前後で内部速度、加速度をなるべく一定にしてご使用ください。
ID : 1611