
ID : 1609
パス動作の効果が小さくなる場合
パス動作後に非動作命令がある場合
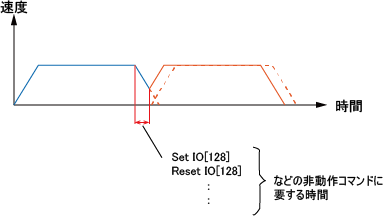
パス動作コマンドと次の動作コマンドの間に、非動作コマンドがあると、パス動作の実行時間短縮効果が小さくなります。非動作コマンドとは、ロボット本体の動作を伴わないコマンドのことをいいます。
下図に、パス動作コマンドと次の動作コマンドとの間に、非動作コマンドがある例を示します。この例のような場合、下図に示すように、パス動作コマンドの減速時間中に非動作コマンドを実行するため、パス動作の実行時間短縮効果が小さくなります。
Sub Main
TakeArm Keep = 1
'パス動作コマンド
Move L, @P P[2]
'非動作コマンド
Set IO[128]
'非動作コマンド
Reset IO[128]
' :
' :
'パス動作コマンド
Move L, @P P[3]
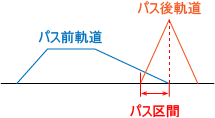
パス後の軌道が短い場合
パス後の軌道が短く速度パターンが三角パターンになる場合、パス開始位置は、パス後の軌道の加速終了時にパス動作が終了するように遅れます。したがって、下図のようにパス前軌道の減速度が小さい場合、特にパス効果が小さくなります。
ID : 1609