
ID : 1043
瞬時停止(全タスク)(入力)
機能
実行中のプログラムに、外部から瞬時停止をかけるときに入力します。全部のタスクが瞬時停止します。
入力条件と動作
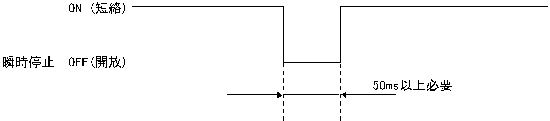
- この信号がON(短絡)→OFF(開放)されると、ロボットは現在実行中のステップの途中で瞬時に停止し、ロボット運転中出力をOFFします。しかし自動モード、外部モードは維持されており、プログラムスタート信号の入力でプログラムの続きを実行します。
- ティーチングペンダントまたはミニペンダントによる内部運転の場合は、この信号がON(短縮)→0FF(開放)されたときに限り有効です。
- 瞬時停止後の再起動方法は「プログラムスタート(入力)」を参照してください。
- 最低パルス幅は50ms以上としてください。
状態図
 |
ID : 1043