
ID : 1039
プログラムスタート(入力)
機能
プログラムNo.選択信号で指定したプログラムを、外部機器からスタートさせます。
入力条件と動作
外部モードのとき、この入力をOFF(開放)→ON(短絡)することにより、下記のように動作します。(必ずOFFからONへの状態変化が必要です。)
ロボットがプログラムを未だ実行していないとき
ロボットがプログラムを未だ実行していないとき、または、1サイクル終了して停止中のとき、プログラムスタート信号を入力すると(OFFからON)、プログラムNo.選択信号を読み込み、そのプログラムを1サイクル実行して停止します。
プログラムNo.選択信号は、プログラムスタートより必ず先(1ms以上)に入力し、ロボットがスタートするまで、状態を維持してください。この条件を満足しないとエラーを表示して、モータ電源をOFFします。(注:このとき、標準仕様の場合は内部自動モードへの切り替えを行ない、グローバル仕様の場合は単一位置制御機能の設定に従い外部自動モードのままです。)
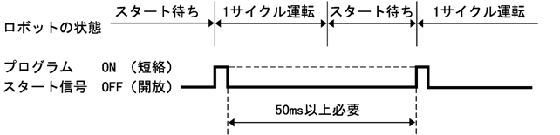 |
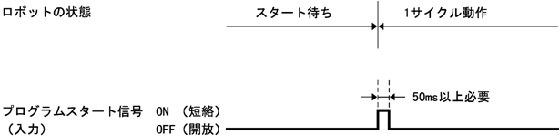
プログラムスタート信号は、OFF(開放)→ON(短絡)の入力の前に、プログラムスタート準備時間(50ms以上)が必要です。
プログラムスタート準備時間のあいだ、プログラムスタート信号は、OFF(開放)になったままでなければなりません。プログラムスタート準備時間のあいだに、プログラムスタート信号がON(短絡)になると、次のサイクルはスタートしません。
新しいサイクルをスタートするためには、1サイクルごとに、外部スタート信号のOFF→ONが必要です。
プログラム実行途中のステップ停止状態
プログラム実行途中のステップ停止状態で、プログラムスタート信号をOFFからONさせると、停止しているステップの次のステップから実行を開始し、サイクルエンドで停止します。
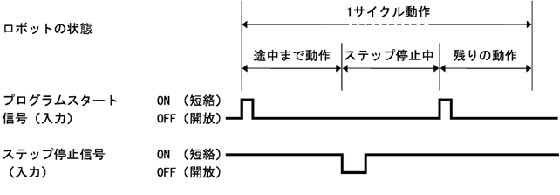 |
ステップ停止状態から残りの動作を中断し、プログラムの先頭からスタートさせる場合は、プログラムリセット信号、プログラムNo.選択信号、プログラムスタート信号の3つを同時に入力して、任意のプログラムを先頭からスタートできます。詳しくは、「プログラムリセット(入力)」を参照してください。
プログラム実行途中の瞬時停止状態
プログラム実行途中の瞬時停止状態で、プログラムスタート信号をOFFからONさせると、停止しているステップの続きから実行を開始し、サイクルエンドで停止します。
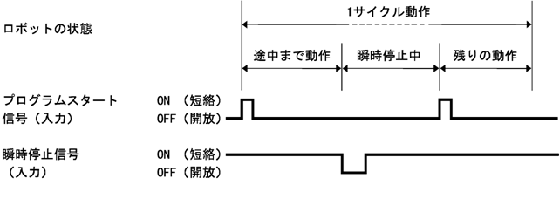 |
注意:瞬時停止状態から残りの動作を中断し、プログラムの先頭からスタートさせる場合は、プログラムリセット信号、プログラムNo.選択信号、プログラムスタート信号の3つを同時に入力して、任意のプログラムを先頭からスタートできます。詳しくは、「プログラムリセット(入力)」を参照してください。
プログラムスタート信号の(立ち上げ)ON、(立ち下げ)OFFのタイミング例
プログラムスタート信号立ち上げ(ON)のタイミング例
ロボット専用出力(外部モード出力と1サイクル終了出力)でプログラムスタート信号を立ち上げる方法を下図に示します。
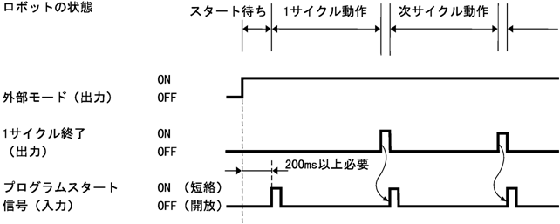 |
1サイクル目のプログラムスタート信号は、外部モードONと周辺装置の条件完了で立ち上げます。2サイクル目以降は1サイクル終了出力でプログラムスタート信号を立上げます。
プログラムスタート信号立ち下げ(OFF)のタイミング例
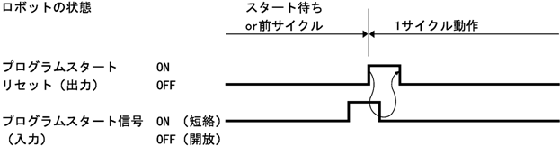
ロボット専用出力(プログラムスタートリセット出力)でプログラムスタート信号を立ち下げる方法
ロボット専用出力(プログラムスタートリセット出力)でプログラムスタート信号を立ち下げる方法を下図に示します。
ロボットのプログラムがスタートすると、プログラムスタートリセットが出力されます。外部でこの出力を受け、プログラムスタート信号を立ち下げ(OFF)ます。
 |
簡易方式(タイマーによる1ショット方式)でプログラムスタート信号を立ち下げる方法
簡易方式(タイマーによる1ショット方式)でプログラムスタート信号を立ち下げる方法を下図に示します。
 |
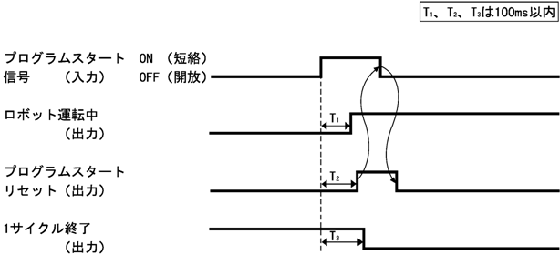
- 1ショットは簡便な方式ですが、前サイクルの途中からプログラムスタート信号を立ち上げるような使い方のとき、立ち下げのタイマーの設定が難しくなります。
ロボットが毎サイクル停止してから、プログラムスタート信号を立ち上げる方法の場合にのみ使用してください。 - プログラムスタート信号を入力してから、ロボット運転中、プログラムスタートリセット、1サイクル終了の順番で出力信号は変化します。(下図のT1→T2→T3)
このときの出力信号変化は、プログラムスタート信号を立ち上げて(ON)から100ms以内に起こります。
 |
ID : 1039