
ID : 290
DevH
機能
ポジション型データの基準位置座標系での偏差演算結果を返します。
解説
基準位置から、基準位置座標系で、偏差分加算した点を算出します。
ここで基準位置座標系とは、基準位置として指定したポジション型データの、位置成分(X,Y,Z)を原点とし、姿勢成分(Rx,Ry,Rz)を座標軸の傾きとする座標系のことです。ただし、4軸ロボットのT軸は基準座標に関係なく、ポジション型で指定したRz分が加算されます。
戻り値のFig要素は基準位置のFig要素が代入されます。
戻り値が動作範囲外の場合はレベル1のエラーです。"エラー処理ルーチン"参照
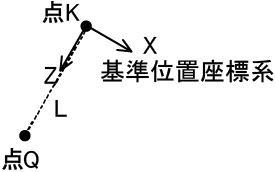
点Kを基準位置とすると
点Q = DevH(点K, P(0,0,L,0,0,0))関連項目
注意事項
-
用例
'!TITLE "デンソーロボットプログラム"
Sub Sample_DevH
Dim aaa As Position
Dim bbb As Position
' X、Yが200、Zが-300の座標位置をaaaに代入
aaa = P( 200, 200, -300, 0, 0, 0, -1 )
bbb = DevH( aaa, P( 100, 100, 100, 90, 90, 90, -1 ) )
' メッセージ出力ウィンドウに計算結果を表示
PrintDbg bbb
End SubID : 290