
ID : 18053
ロボットコントローラとの通信用パラメータ設定
ロボットコントローラ通信用のパラメータを設定します。
1
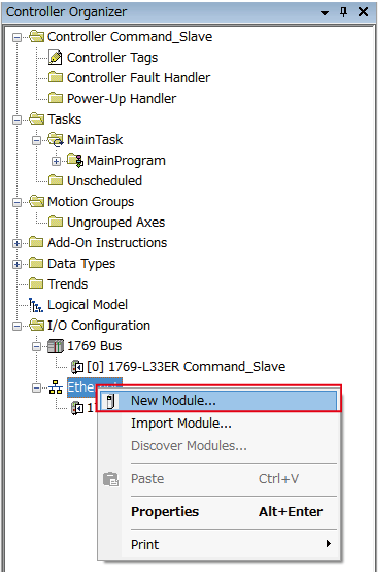
[Controller Organizer]から[I/O Configuration] - [Ethernet] - [New Module]を選択します。
2
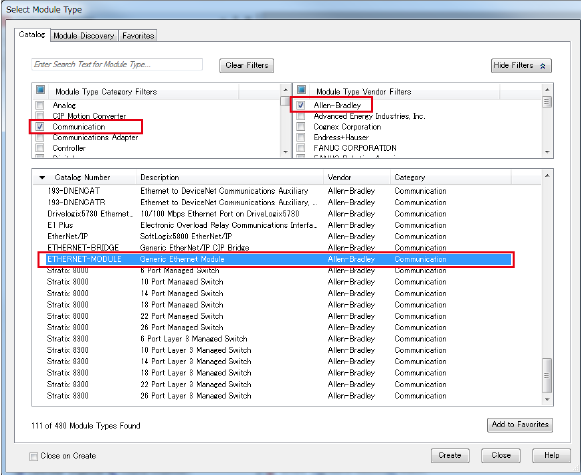
[Select Module Type]画面が表示されます。
[Catalog]タブをクリックし、画面下側のリストから[ETHERNET-MODULE](汎用Ethernet-Module) を選択し、[Create]をクリックします。
フィルタ機能を使用すると、探しやすくなります。
| Module Type Category Filters | Communication |
|---|---|
| Module Type Vendor Filters | Allen-Bradley |
3
[New Module]画面が表示されます。 ロボットコントローラを通信相手の機器として指定するため、以下のように項目を設定します。
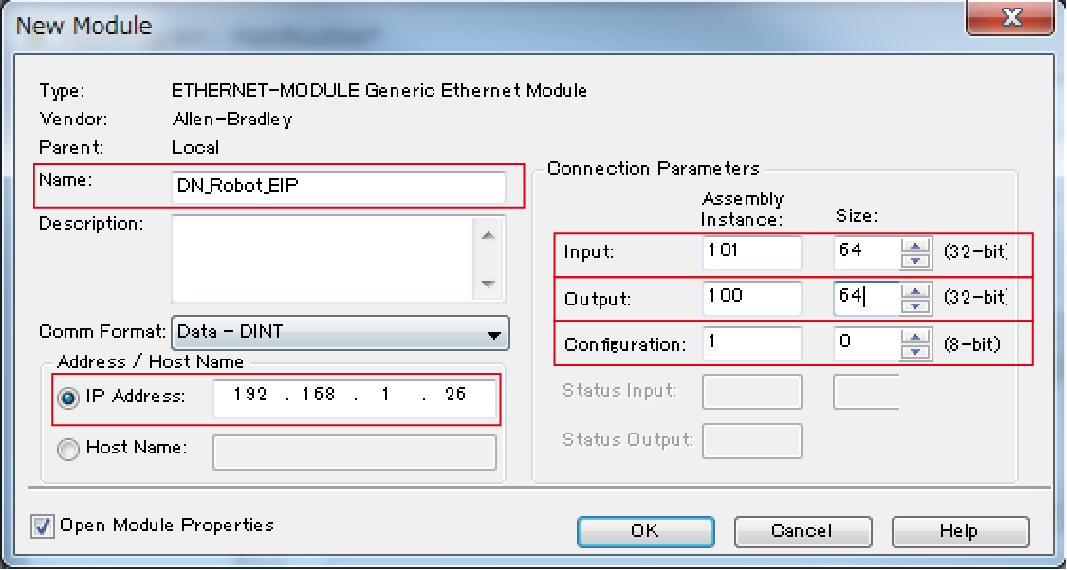
| Name | 任意の名前 | |
|---|---|---|
| IP Address | ロボットコントローラのIPアドレスを入力 | |
| Input | Assembly Instance | 101 |
| Size | 次式で計算した値を設定してください。 [Size]*32(bit) = [ロボットコントローラのEtherNet/IP Adapterの出力サイズ]*8(bit) 設定範囲は、64~125です。 |
|
| Output | Assembly Instance | 100 |
| Size | 次式で計算した値を設定してください。 [Size]*32(bit) = [ロボットコントローラのEtherNet/IP Adapterの入力サイズ]*8(bit) 設定範囲は、64~124です。 |
|
| Configuration | Assembly Instance | 1 |
| Size | 0 | |
上記の項目を入力後、[OK]をクリックして設定を反映させます。
4
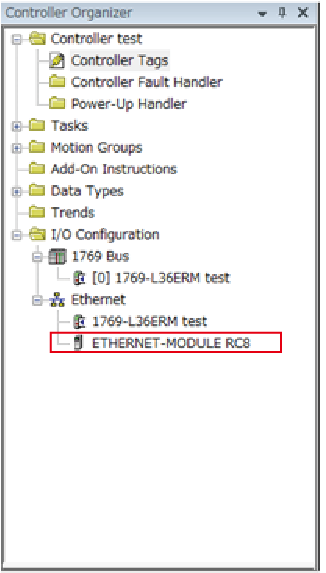
[Controller Organizer]にロボットコントローラ用の "ETHERNET-MODULE RC8" が追加されたことを確認します。
5
[Controller Organizer]内の、[Controller Tags]をダブルクリックします。
[Controller Tags]画面が表示されます。 ロボットコントローラ用の入出力Tagが、STEP3で設定したとおりに生成されているか確認します。
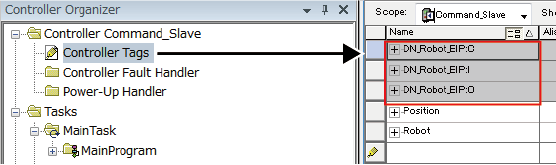
| 入力Tag | Name | 任意の名前:I |
|---|---|---|
| Data Type | DINT[指定したInputのSize] |
|
| 出力Tag | Name | 任意の名前:O |
| Data Type | DINT[指定したOutputのSize] |
"任意の名前:C"は、使用しないTagです。
ID : 18053