
ID : 7874
I/Oの設定
ロボットコントローラと通信を行うためのI/Oを設定します。
下記に、その手順を説明します。
1
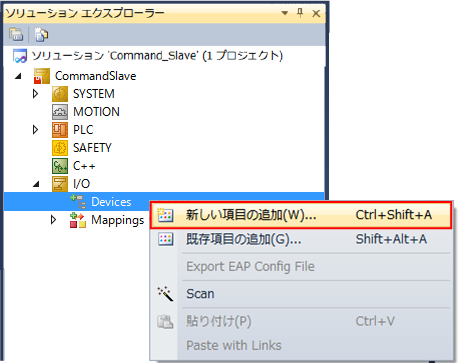
「ソリューション エクスプローラー」タブの「Devices」を右クリックします。
[新しい項目の追加]をクリックします。
2
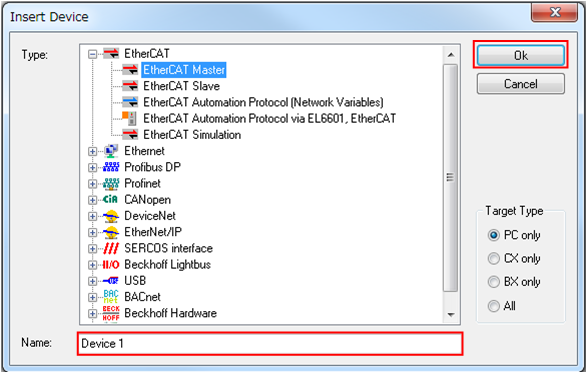
使用するフィールドネットワークの種類を選択します。
この例では、"EtherCAT Master"を選択します。
任意の名前を入力し、[Ok]をクリックします。
3
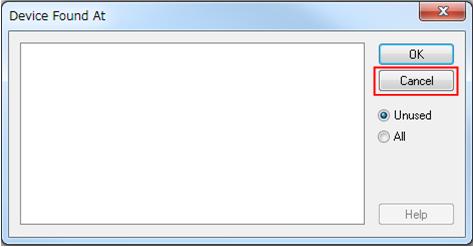
[Cancel]をクリックします。
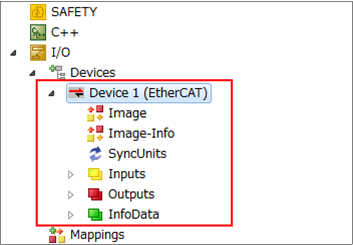
「Devices」の下階層に、選択したフィールドネットワークの項目が追加されます。
4
下記URLから、デンソーウェーブロボットHPへアクセスし、フィールドネットワーク設定ファイルをダウンロードします。
https://www.denso-wave.com/ja/robot/download/application/
「アプリケーションソフトウェア」ページ内の「フィールドネットワーク設定ファイル」をクリックします。

5
使用するフィールドネットワークに合った設定ファイルをダウンロードします。
この例では、「RC8 EtherCAT Slave用ESIファイル(SysmacStudio以外使用時)」をダウンロードします。

6
ダウンロードしたフィールドネットワーク設定ファイルを解凍し、アプリケーションにインストールします。
この例では、下記のフォルダにダウンロードしたファイルを保存することで、インストールが完了します。
C:\TwinCAT\3.1\Config\Io\EtherCAT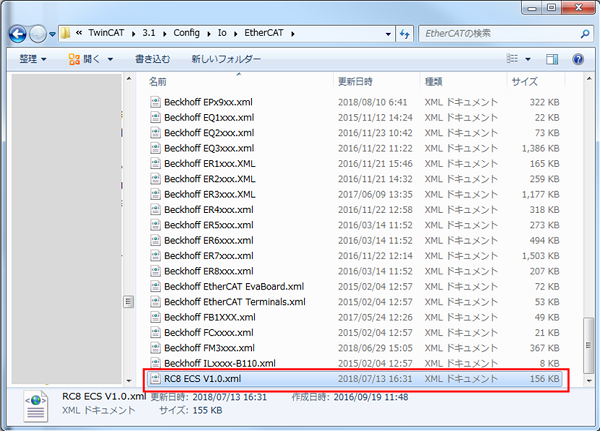
7
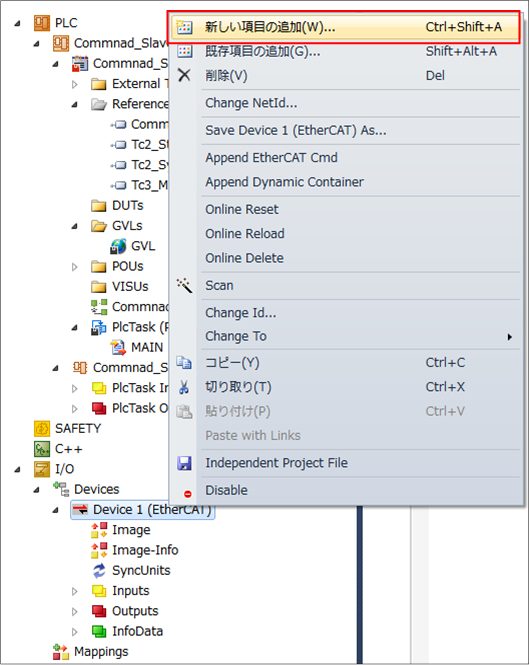
STEP3で追加したフィールドネットワークの項目を右クリックします。
「新しい項目の追加」をクリックします。
8
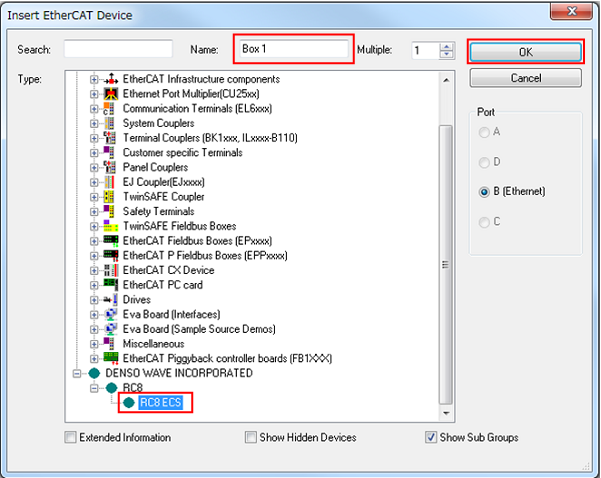
[DENSO WAVE INCORPORSTED] - [RC8] - [RC8 ECS]を選択します。
任意の名前を入力し、[OK]をクリックします。
9
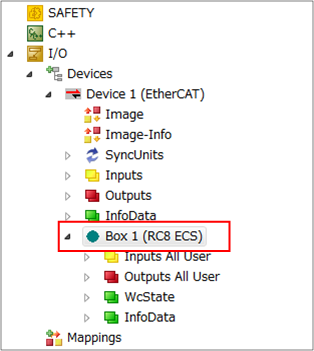
ECSファイルが追加されます。
追加された項目をダブルクリックします。
10
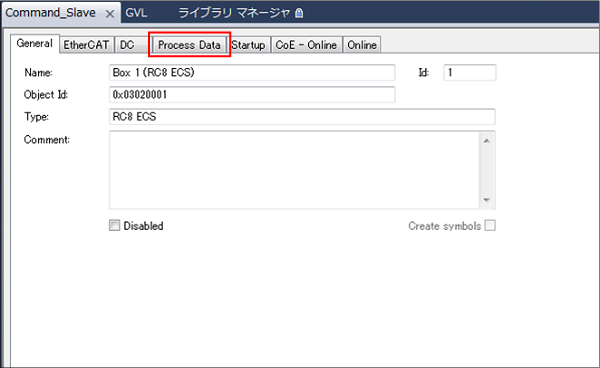
プロパティが表示されます。
「Process Data」タブを選択します。
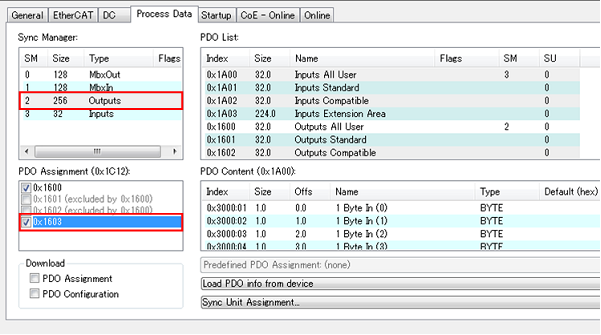
11
「Sync Manager」の項目の「Outouts」を選択し、「PDO Assignment」の項目の[0x1603]にチェックを入れます。
12
続いて、「Sync Manager」の項目の「Inputs」を選択し、「PDO Assignment」の項目の[0x1A03]にチェックを入れます。
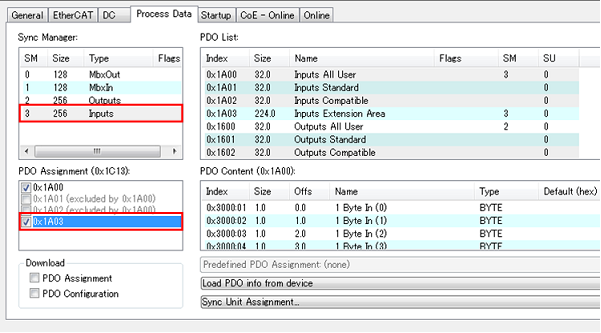
以上で、I/Oの設定は完了です。
ID : 7874