
ID : 7875
I/Oのマッピング
ロボットコントローラとPLC間でフィールドネットワーク通信を行うために、入出力用グローバル変数をマッピングする必要があります。
下記に、その手順を説明します。
入力用グローバル変数のマッピング
1
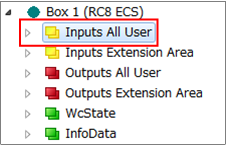
「I/Oの設定」で追加した、ECSファイル内の「Inputs All User」をダブルクリックします。
2
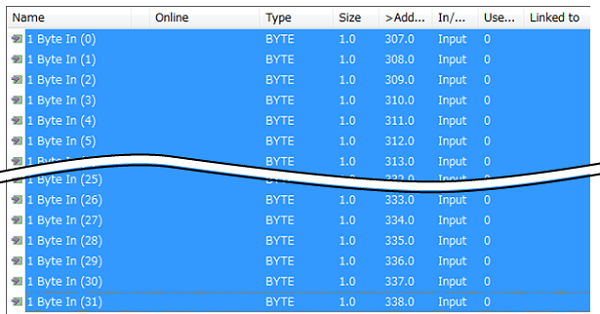
すべての項目を選択します。
先頭の項目を選択し、キーボードの「Shift」キーと「End」キーを押すと、すべての項目を選択できます。
3
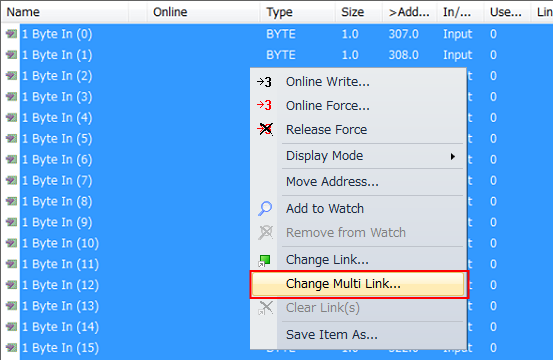
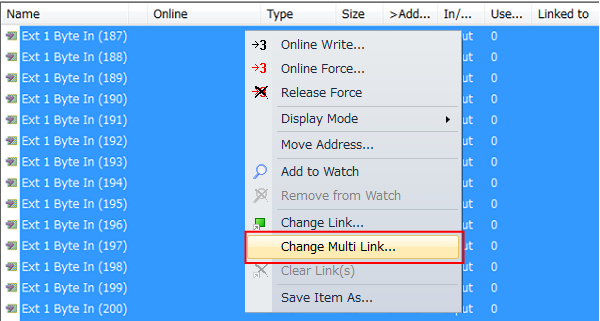
すべての項目を選択した状態で、選択箇所を右クリックします。
[Change Multi Link...]をクリックします。
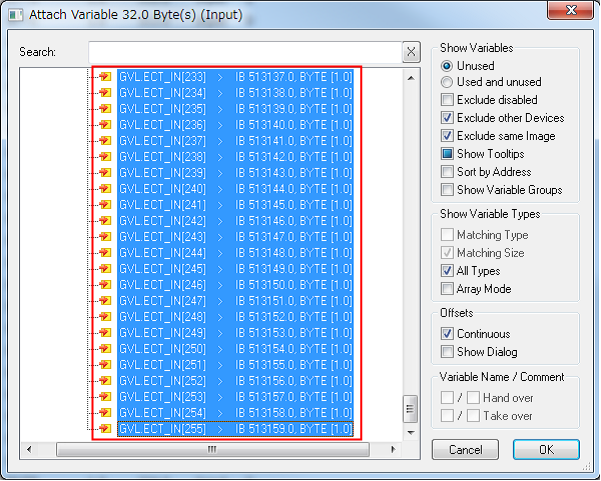
4
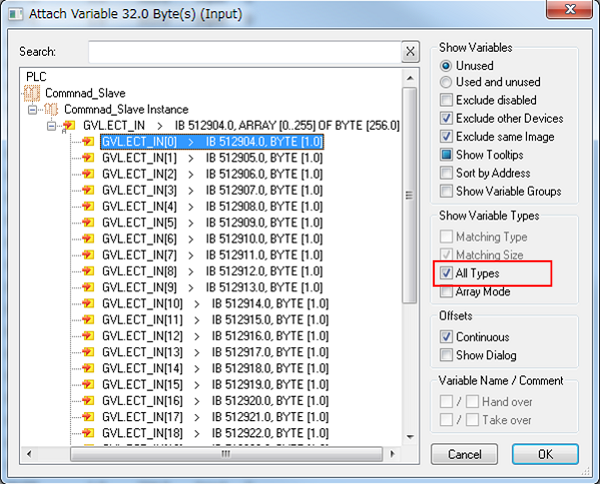
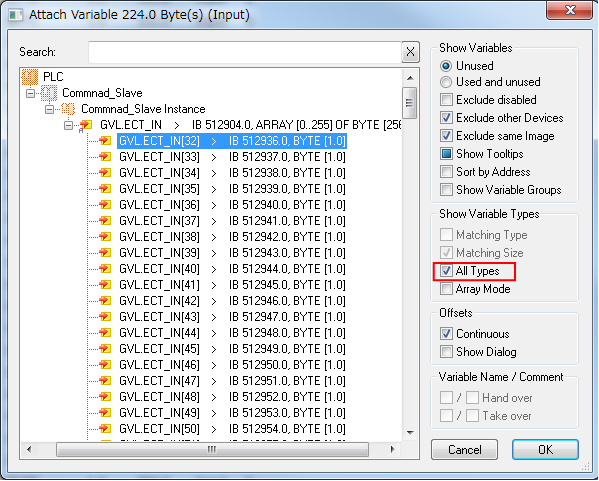
「Show Valiable Types」の項目の[All Types]にチェックを入れます。
5
マッピングするグローバル変数を選択します。
先頭のグローバル変数を選択し、キーボードの「Shift」キーと「End」キーを押すと、すべての項目(IN[0]~IN[255])を選択できます。
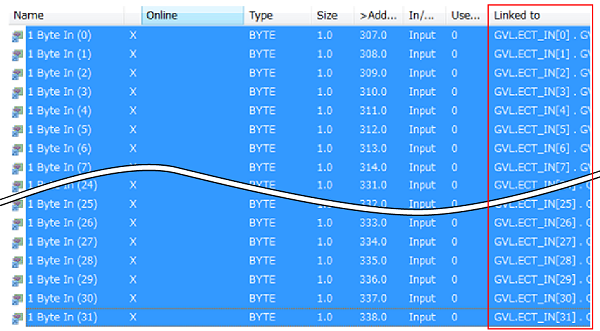
6
[OK]をクリックします。
グローバル変数の先頭から32Byte分がマッピングされます。
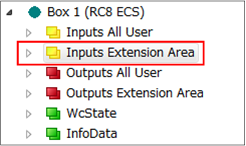
7
STEP6で256Byte中32Byteがマッピングされたので、残りの224Byteをマッピングします。
ECSファイル内の「Inputs Extension Area」をダブルクリックします。
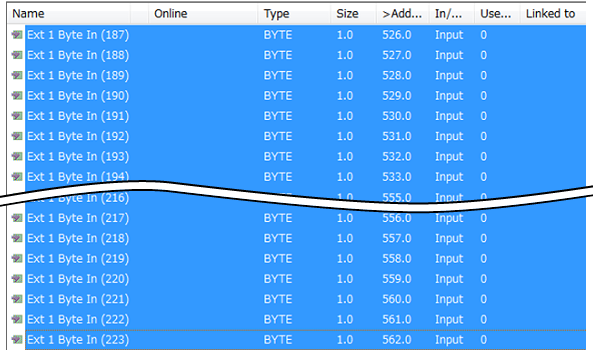
8
すべての項目を選択します。
先頭の項目を選択し、キーボードの「Shift」キーと「End」キーを押すと、すべての項目を選択できます。
9
すべての項目を選択した状態で、選択箇所を右クリックします。
[Change Multi Link...]をクリックします。
10
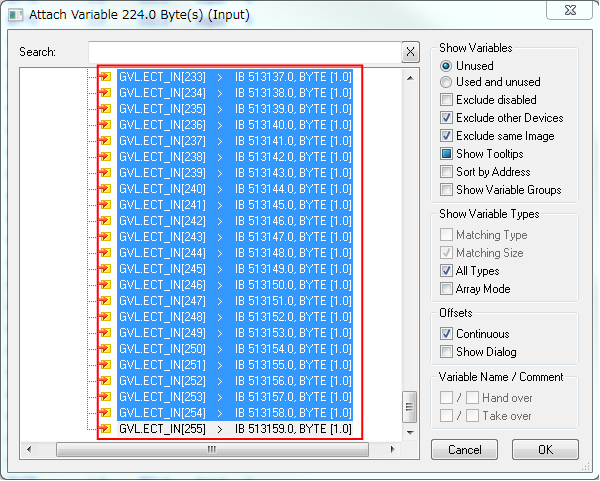
「Show Valiable Types」の項目で[All Types]にチェックを入れます。
11
マッピングするグローバル変数を選択します。
先頭のグローバル変数を選択し、キーボードの「Shift」キーと「End」キーを押すと、すべての項目(IN[32]~IN[255])を選択できます。
12
[OK]をクリックします。
グローバル変数の残りの224Byte分がマッピングされます。
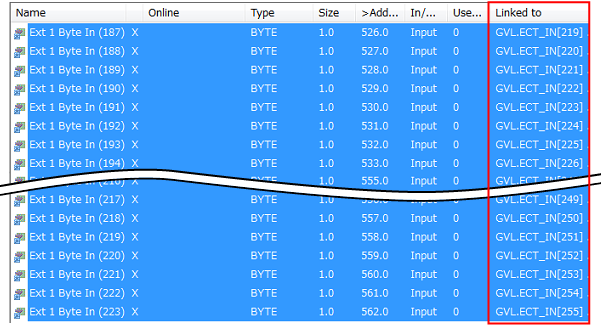
以上で、入力用グローバル変数のマッピングは完了です。
出力用グローバル変数のマッピング
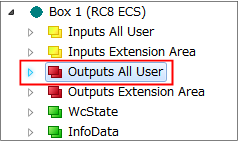
1
I/Oの設定で追加した、ECSファイル内の「Outputs All User」をダブルクリックします。
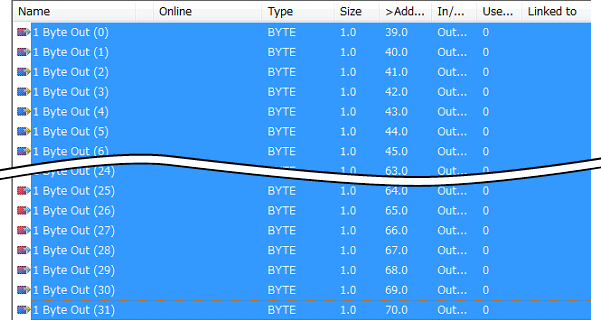
2
すべての項目を選択します。
先頭の項目を選択し、キーボードの「Shift」キーと「End」キーを押すと、すべての項目を選択できます。
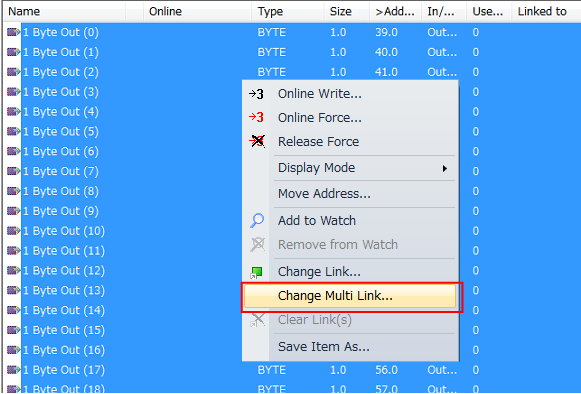
3
すべての項目を選択した状態で、選択箇所を右クリックします。
[Change Multi Link...]をクリックします。
4
「Show Valiable Types」の項目で[All Types]にチェックを入れます。
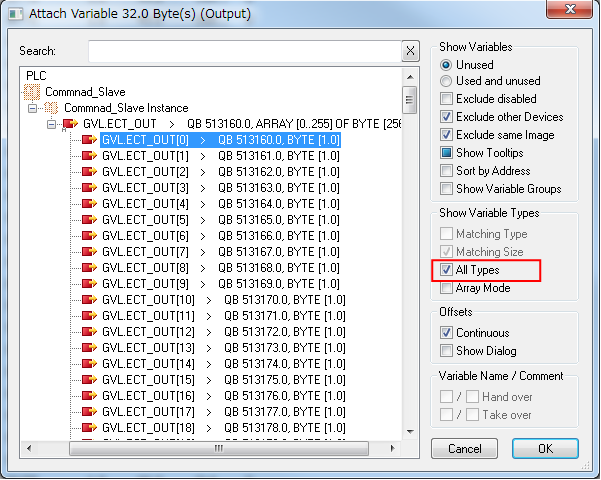
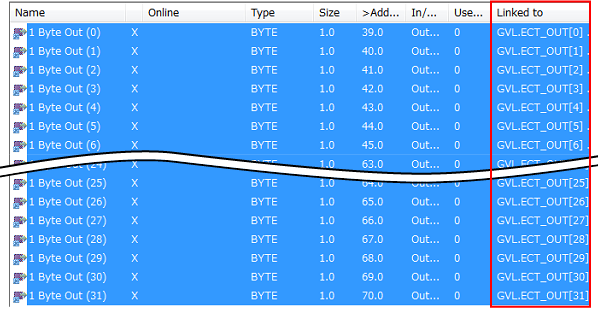
5
マッピングするグローバル変数を選択します。
先頭のグローバル変数を選択し、キーボードの「Shift」キーと「End」キーを押すと、すべての項目(OUT[0]~OUT[255])を選択できます。
6
[OK]をクリックします。
グローバル変数の先頭から32BYTE分がマッピングされます。
7
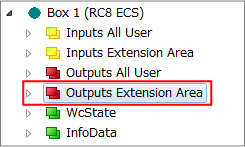
STEP6で256Byte中32Byteがマッピングされたので、残りの224Byteをマッピングします。
ECSファイル内の「Outputs Extension Area」をダブルクリックします。
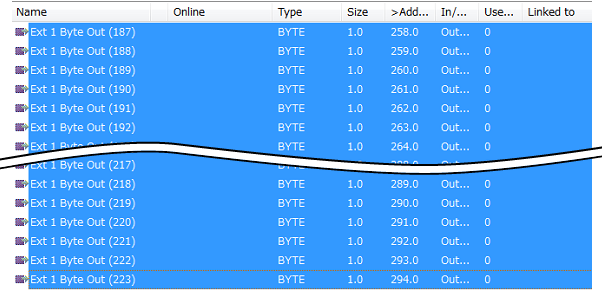
8
すべての項目を選択します。
先頭の項目を選択し、キーボードの「Shift」キーと「End」キーを押すと、すべての項目を選択できます。
9
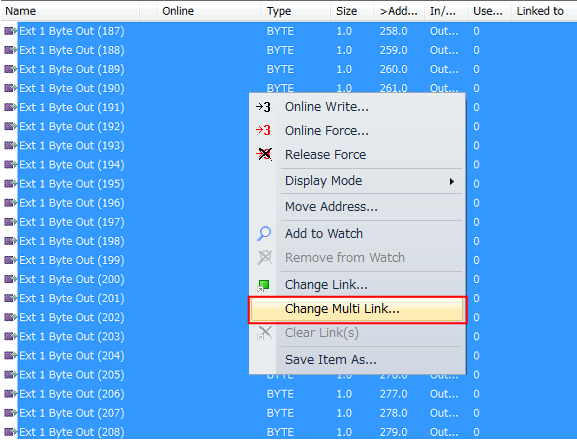
すべての項目を選択した状態で、選択箇所を右クリックします。
[Change Multi Link...]をクリックします。
10
「Show Valiable Types」の項目で[All Types]にチェックを入れます。
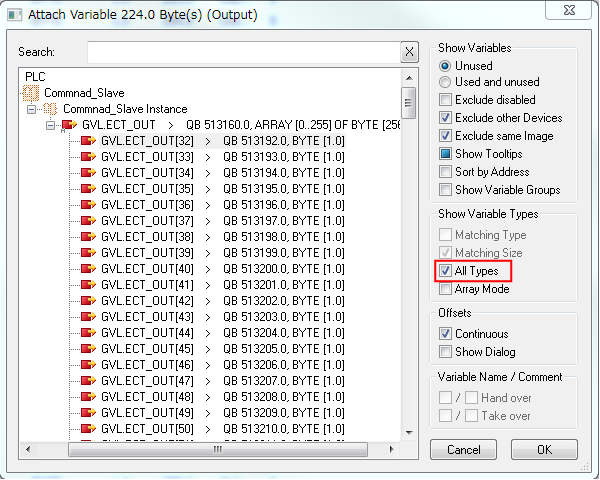
11
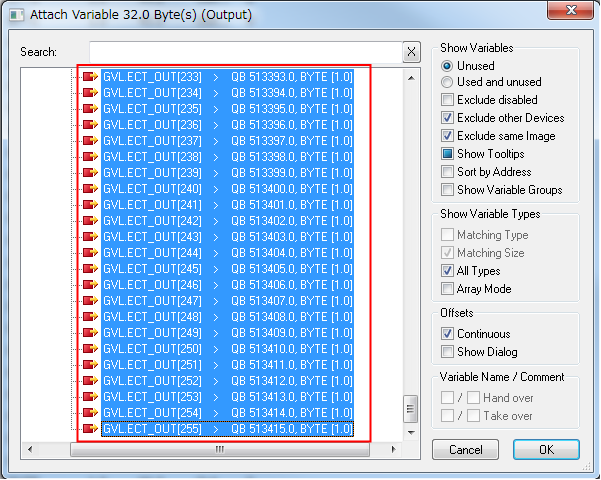
マッピングするグローバル変数を選択します。
先頭のグローバル変数を選択し、キーボードの「Shift」キーと「End」キーを押すと、すべての項目(OUT[32]~OUT[255])を選択できます。
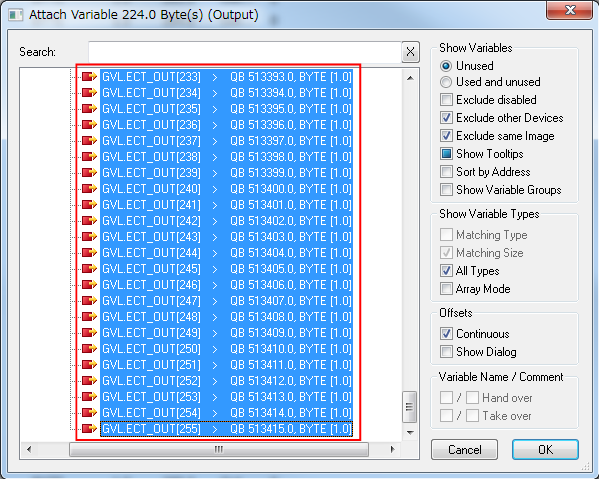
12
[OK]をクリックします。
グローバル変数の残りの224Byte分がマッピングされます。
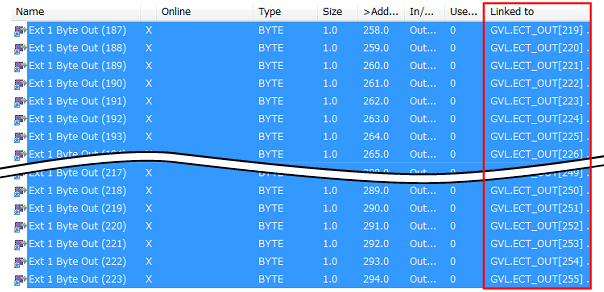
以上で、出力用グローバル変数のマッピングは完了です。
ID : 7875