
ID : 7775
MC_MoveSpline
ロボットを自由曲線補間で移動します。
| グラフィック表示 | FBカテゴリ | |
|---|---|---|
| Ver.5.5 | Ver.5.35 | |
 |
 |
動作 |
入出力変数
| 変数名 | データ型 | 有効範囲 | 初期値 | 省略 |
|---|---|---|---|---|
| AxesGroup | eRC_AxesGroup | 不可 | ||
|
||||
入力変数
| 変数名 | データ型 | 有効範囲 | 初期値 | 省略 |
|---|---|---|---|---|
| Execute | BOOL |
|
FALSE | 不可 |
|
||||
| RouteNo | INT | 1 ~ 20 | 1 | 不可 |
|
||||
| ExtAxPosition | eRC_Joint | 可能 | ||
|
||||
| Velocity | REAL | 0.1 ~ 100.0 | -1.0 | 可能 |
|
||||
| Acceleration | REAL | 0.0001 ~ 100.0 | -1.0 | 可能 |
|
||||
| Deceleration | REAL | 0.0001 ~ 100.0 | -1.0 | 可能 |
|
||||
| CoordSystem | eRC_CoordSys |
|
|
可能 |
|
||||
| BufferMode | INT | 0,1,6,7,8,9 | -1 | 可能 |
|
||||
| TransitionMode | INT | 0,3,10,11 | -1 | 可能 |
|
||||
| TransitionParameter | INT | 0 ~ 32767 | -1 | 可能 |
|
||||
出力変数
| 変数名 | データ型 / 説明 |
|---|---|
| Done | BOOL |
|
|
| NextActionPermit | BOOL |
|
|
| Busy | BOOL |
|
|
| Active | BOOL |
|
|
| CommandAborted | BOOL |
|
|
| Error | BOOL |
|
|
| ErrorID | WORD |
|
|
| ErrorIDEx | DWORD |
|
機能説明
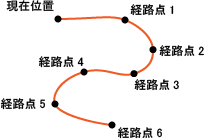
自由曲線補間は経路番号を指定し、動作します。
経路番号には複数の位置データ(経路点)を登録でき、自由曲線補間では指定した経路番号に登録された経路点上を順に滑らかに動作する軌跡を等速で動作します。
注意事項
このFBを実行するには、FBカテゴリ"動作"のFBを実行可能状態にしておく必要があります。
FBカテゴリ"動作"のFBを実行可能状態にするにはFB"MC_Power"を使用します。
ID : 7775