
ID : 7602
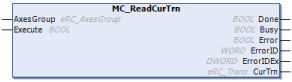
MC_ReadCurTrn
ロボットの現在位置を同次変換型データで返します。
| グラフィック表示 | FBカテゴリ |
|---|---|
 |
非動作 |
入出力変数
| 変数名 | データ型 | 有効範囲 | 初期値 | 省略 |
|---|---|---|---|---|
| AxesGroup | eRC_AxesGroup | 不可 | ||
|
||||
入力変数
| 変数名 | データ型 | 有効範囲 | 初期値 | 省略 |
|---|---|---|---|---|
| Execute | BOOL |
|
FALSE | 不可 |
|
||||
出力変数
| 変数名 | データ型 / 説明 |
|---|---|
| Done | BOOL |
|
|
| Busy | BOOL |
|
|
| Error | BOOL |
|
|
| ErrorID | WORD |
|
|
| ErrorIDEx | DWORD |
|
|
| CurTrn | eRC_Trans |
|
機能説明
- 同次変換型について
- ロボットの教示位置を表現するデータ型です。3次元空間の座標と回転角、ロボットの形態を表すFig要素で表現されます。回転角はオリエントベクトルの各座標軸要素とアプローチベクトルの各座標軸要素で表現します。要素数は10です。
各要素を以下に示します。 - X, Y, Z
- ワーク座標原点からのX軸、Y軸、Z軸の座標です。
- Ox, Oy, Oz
- オリエントベクトルのX軸、Y軸、Z軸要素です。
- Ax, Ay, Az
- アプローチベクトルのX軸、Y軸、Z軸要素です。
- Fig
- ロボットの形態(6軸、4軸)を表すFig成分です。
注意事項
-
ID : 7602