
ID : 7386
MC_SetZforce
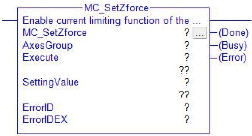
Hシリーズロボットの第3軸(Z軸)の電流制限機能を推力で指定し、有効にします。
| グラフィック表示 | AOIカテゴリ |
|---|---|
 |
動作 |
入出力変数
| 変数名 | データ型 | 有効範囲 | 入出力条件 |
|---|---|---|---|
| AxesGroup | eRC_AxesGroup | - | |
|
|||
入力変数
| 変数名 | データ型 | 有効範囲 |
|---|---|---|
| Execute | BOOL |
|
|
||
| SettingValue | REAL | 0以上 |
|
||
出力変数
| 変数名 | データ型 / 説明 |
|---|---|
| Done | BOOL |
|
|
| Busy | BOOL |
|
|
| Error | BOOL |
|
|
| ErrorID | INT |
|
|
| ErrorIDEx | DINT |
|
機能説明
- 電流制限機能について
- ロボットの各軸毎に柔らかさを設定する機能です。各軸モータのトルク(電流値)を制限する事で柔らかさを実現します。主にロボットやワークに過大な力が加わるのを防止したり、過負荷や過電流エラーにて停止するのを防止する為に使用します。
注意事項
このAOIを実行するには、AOIカテゴリ"動作"のAOIを実行可能状態にしておく必要があります。
AOIカテゴリ"動作"のAOIを実行可能状態にするにはAOI"MC_Power"を使用します。
ID : 7386