
ID : 5899
コマンド入力支援機能
概要
一部のコマンドを自動入力する機能です。必要なパラメータなども一度に入力できますので、プログラム入力を容易にします。手動モードのみ使用可能です。本機能はVer1.8.*から使用可能です。
コマンド入力画面
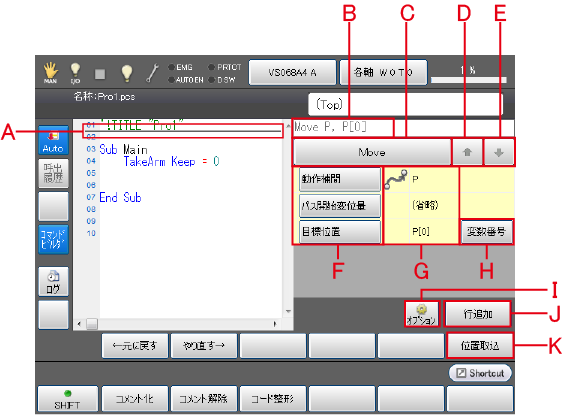
| 記号 | 項目 | 説明 |
|---|---|---|
| A | コマンド追加カーソル | コマンドを追加する行を表示します。画面タッチ、上下キー、ジョグダイアルで移動することができます。 |
| B | コマンド文字列表示領域 | 現在設定されているコマンドとパラメータを文字列で表示します。 |
| C | コマンド選択ボタン | コマンドリスト画面へ表示を切り替えます。 |
| D | 前ページボタン | コマンドリストの前ページを表示します。 |
| E | 次ページボタン | コマンドリストの次ページを表示します。 |
| F | パラメータボタン | 各パラメータのボタンを押下すると、パラメータ選択画面へ表示を切り替えます。 |
| G | パラメータ値 | 現在設定されているパラメータ値を表示します。 |
| H | パラメータ値設定ボタン | パラメータ値に任意の値指定がある場合に表示されます。テンキーが表示されますので任意の値を入力して、[OK]ボタンを押下すると値が確定します。ボタンの種類は以下の2つがあります。
|
| I | オプションボタン (Ver.1.12.*以降) |
Approach、Moveコマンドでの[行追加]時のオプションを表示します。以下の3つから選択し[OK]ボタンを押します。
|
| J | 行追加ボタン | 現在設定されているコマンドとパラメータの文字列をコマンド追加カーソルの位置へ挿入します。 |
| K | 位置取込 |
ロボットの現在位置の座標を取込みます。(*1) |
*1:変数への取込みや直値の書換えができます。
- 変数の場合
カーソルのある行でグローバル変数のP型、J型、T型変数を使用している場合は、変数に値を取込みます。
ただし、P型、J型、T型のインデックスに変数、関数、マクロ定義が使用されている場合は、位置取込ができません。Move P, P[0]Move P, P[aaa] '位置取込不可
- 直値の場合(Ver.1.13.*以降)
P型、J型、T型の直値が表記されている場合は、その値を現在位置の値に書換えます。
ただし、P型、J型、T型の要素に変数、関数、マクロ定義が使用されている場合は、位置取込ができません。Move P, P( 446.7207, 275.725, 329.036, 180, -0.0122849, -148.3163, 5 )Move P, P( aaa, 275.725, 329.036, 180, -0.0122849, -148.3163, 5 ) '位置取込不可
手順
コマンド入力支援機能の使用方法は以下の手順で行います。
- コマンドを選択する。
- 設定するパラメータを選択し、値を決定する。
- コマンドを挿入する。
ここではプログラムの7行目に「Depart L, @P 50」を入力する場合を例に説明します。
1
[F1 プログラム] - 編集するプログラムファイルを選択 - [F5 編集] - [SHIFT]を押して[コマンドビルダ]を選択します。
「コマンド入力画面」が表示されます。
2
コマンドを挿入する位置を設定します。画面タッチ、上下キー、ジョグダイアルを使用してコマンド追加カーソルを6行目に移動します。
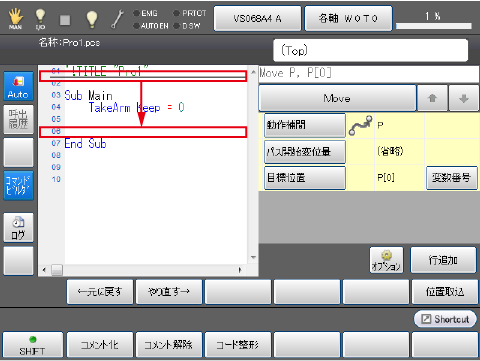
コマンド追加カーソルが6行目に移動しました。
3
「コマンド選択」ボタンを押します。
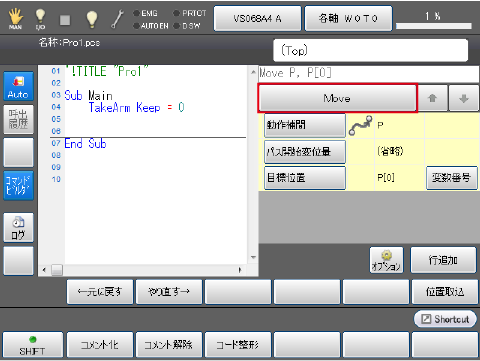
コマンドリストが表示されます。
4
コマンドリストから「Depart」を選択します。
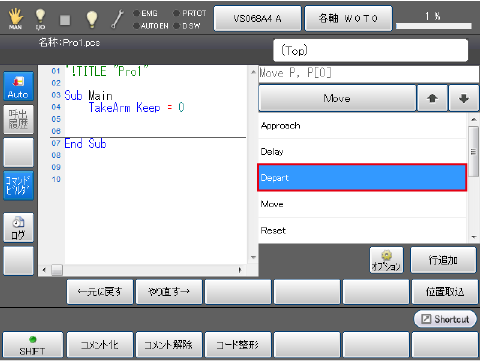
コマンド「Depart」が選択されました。
5
動作補間を設定します。「動作補間」ボタンを押します。
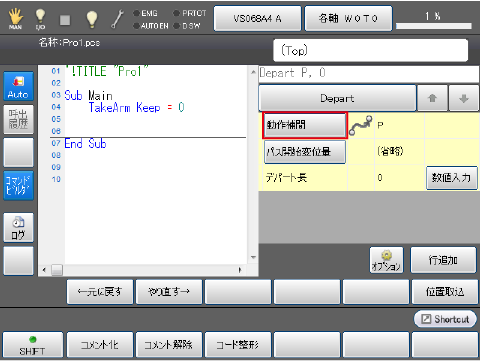
動作補間リストが表示されます。
6
動作補間リストから「L」を選択します。
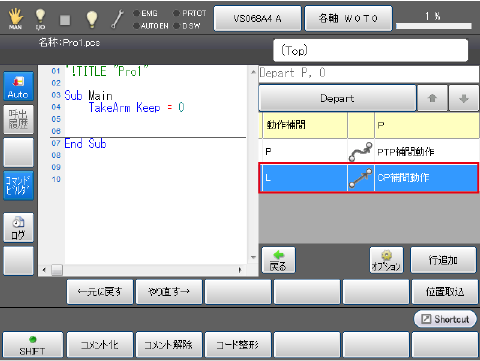
動作補間が設定されました。
7
パス開始変位量を設定します。「パス開始変位量」ボタンを押します。
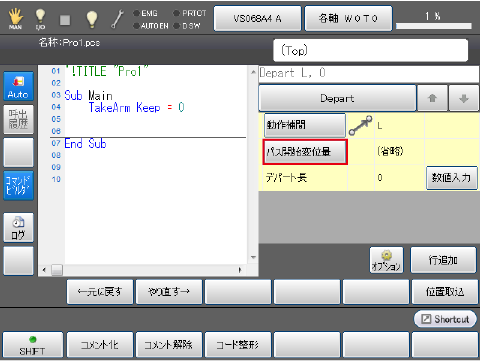
パス開始変位量リストが表示されます。
8
パス開始変位量リストから「@P」を選択します。
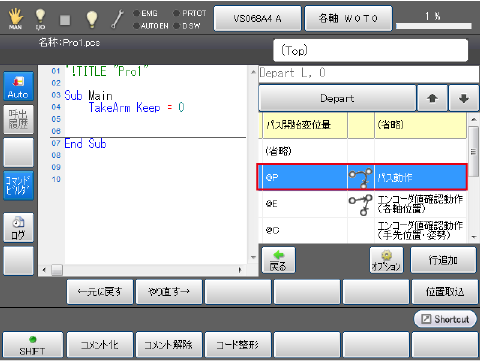
パス開始変位量が設定されました。
9
デパート長を設定します。デパート長項目の「数値入力」ボタンを押します。
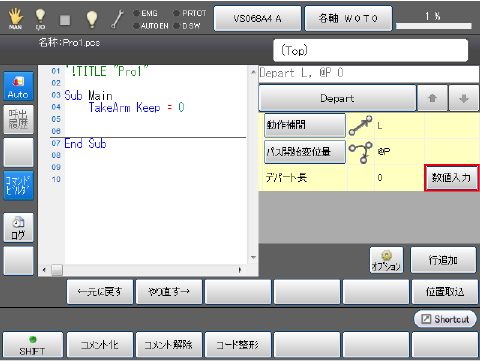
テンキーが表示されます。
10
"50"と入力して[OK]を押します。
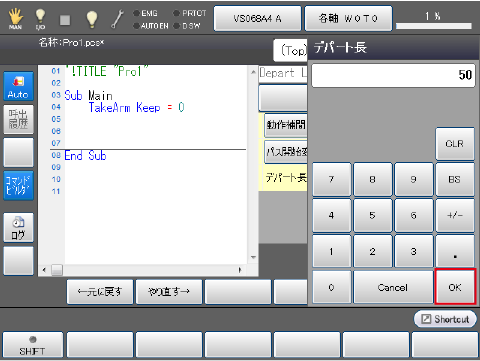
デパート長が設定されました。
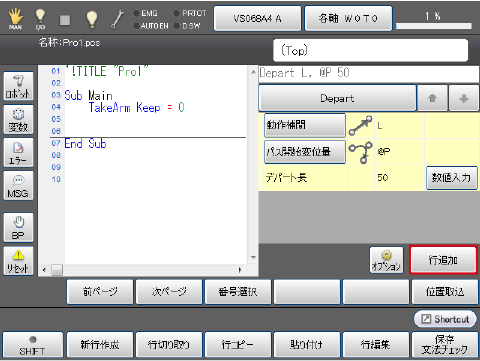
11
コマンドを挿入します。「行追加」ボタンを押します。
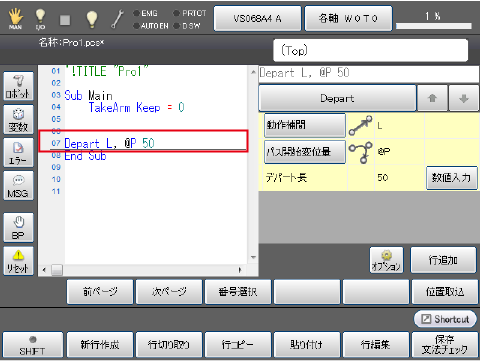
7行目にコマンドが挿入されました。
ID : 5899