
ID : 5633
CALSET
CALSETとは
コントローラが認識する位置情報と、ロボット本体の実際の位置の関係を較正することを、CALSETといいます。CALSETでは、各軸にあらかじめ決められた固定できる位置があり、その位置とエンコーダ値を対応させるCALSETデータを作成します。このとき軸を固定した位置をCALSET位置と呼び、CALSET位置が何度であるかを記録したデータがRANG値です。
ロボットの各軸を手動でCALSET位置までもっていき、ティーチングペンダントによる操作にてコントローラに位置情報を認識させ、CALSETが完了します。
- CALSETデータは、ロボット1台ごとに異なります。
- モータ交換やエンコーダのバックアップ電池が消耗しエンコーダ内の位置データが消滅したときには、CALSETが必要になります。
- ロボットのCALSETデータはお客様にて管理してください。「プロジェクトのバックアップについて」を参考にして、定期的にCALSETデータをバックアップしてください。
ロボット出荷時の状態
ロボット出荷時は、エンコーダのバックアップ電池が取付けられていません。電池取付け後は以下の手順に従い、必ずCALSETを実施してください。
CALSETの準備作業
手でロボットの各軸を動かし、メカストッパやCALSET治具などに押当てCALSET位置を決めます。
L軸
| CALSET治具 | 手動操作とCALSET位置 | CALSET位置 |
|---|---|---|
| メカストッパを利用 | マイナス方向端にあるメカストッパにL軸を押当てます。 | 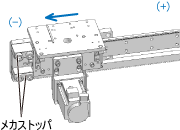 |
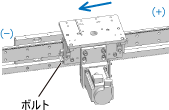
ボルトを利用 (1本のレール上に複数のL軸を配置する場合) |
連結プレートのタップ穴にボルトを取付け、マイナス方向にL軸を押し当てます。 CALSET後は必ずボルトを外して大切に保管してください。 ボルト:(株)ミスミ社製 型式:MSB12-50 |
|
Y軸・Z軸
| CALSET治具 | 手動操作とCALSET位置 | CALSET位置 |
|---|---|---|
| 治具不要 | マイナス方向端にスライダを押当てます。ブレーキ付はブレーキ解除時の落下に注意してください。 Z軸は自重で落下します。CALSETト位置へ押付け気味に合わせてください。 |
|

S軸
| CALSET治具 | 手動操作とCALSET位置 | CALSET位置 |
|---|---|---|
| 不要 | マイナス方向端にスライダを押当てます。 |  |
ティーチングペンダントによる操作
ユーザレベル「メンテナ」にて操作します。
操作経路: [F2 アーム]-[F12 保守]-[CALSET](メニュー)-[CALSET]を押します。
1
[CALSET設定]ウィンドウが表示されます。
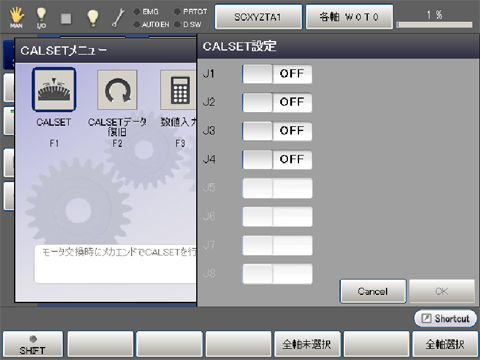
2
CALSETする軸の[ON]および[OFF]を選択し、[OK]を押すと、確認用のシステムメッセージが表示されます。
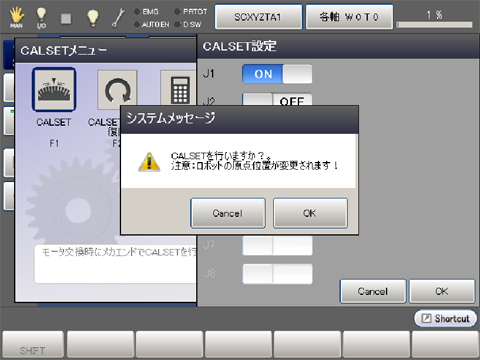
3
[OK]を押すと、該当軸のCALSETが完了します。
ID : 5633