
ID : 5573
接続方法
ハードの接続方法について説明します。
ハードの接続方法
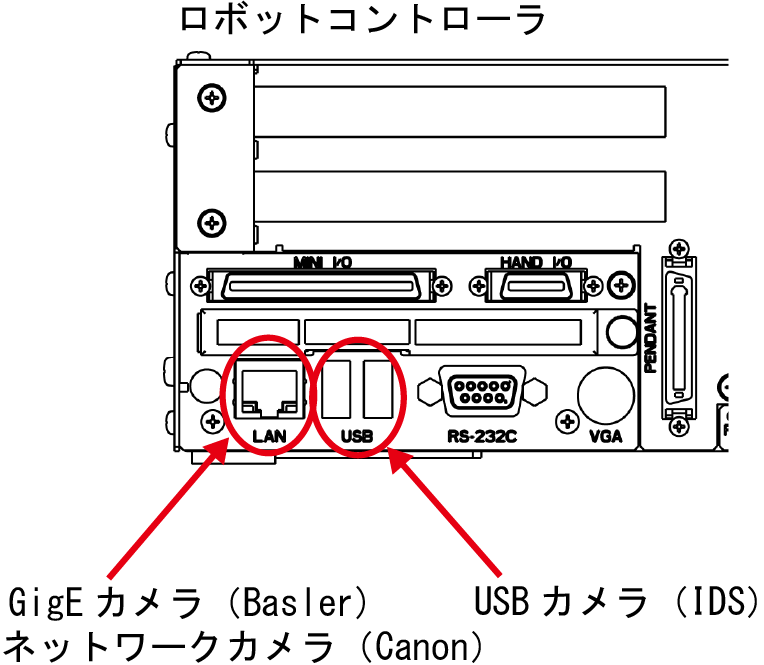
USBカメラ(IDS)の場合は ロボットコントローラのUSBポートへ接続します。
GigEカメラ(Basler)およびネットワークカメラ(Canon)の場合は、ロボットコントローラのLANポートへ、設定時はHUBを経由して接続し、実行時は直接接続します。
GigEカメラ(Basler)を下記の機能と合わせて利用する場合、データの干渉を避けるためPCIタイプの増設LANポート(型式ETG3-PCI、I/Oデータ製)に単独でカメラを接続することを推奨します。
- 力センサ(LAN接続)を使用する。
- コンベアトラッキングを複数台のロボットで行う。
- 協調機能を利用するなど。
事前準備
以下の事前準備を行います。
コントローラ、PCの接続とIPアドレス設定
PCをコントローラにLAN接続します。PCとコントローラの通信ができるように、それぞれのIPアドレスを指定します。コントローラのIPアドレス設定については、ティーチングペンダント操作ガイドの「通信設定画面の表示・変更」を参照してください。
視覚オプションの有効化(必要時)
コントローラの「DENSO Robot Imaging Library」を有効にします。すでに組み込まれている場合やEVPを利用する場合は、作業は不要です。
設定には、ライセンスが必要です。詳細は「オプション機能とライセンス」を参考にしてください。また、設定方法については、ティーチングペンダント操作ガイドの「機能拡張画面の表示、追加/削除」を参照してください。
ID : 5573