
ID : 5359
キャリブレーション
概要
コンベア、ビジョンセンサ、ロボットに関して、それぞれの正確な位置関係を計測します。
キャリブレーション結果は、以下に示すパラメータとして保存され、コンベアトラッキング動作を行う際に使用されます。
キャリブレーションはコンベア毎に実施してください。
ロボットとコンベアの位置関係に関するパラメータ
| パラメータの名称 | 内容 |
|---|---|
| コンベアCALDATA値X, Y | コンベアの進行方向を示すベース座標Z軸回りの回転角度[rad] |
| コンベアCALDATA値Z | コンベアの進行方向を示すベース座標XY平面から見た傾き[rad] |
| コンベア送り量 | エンコーダ1回転あたりのコンベアの進み量[mm/rev] |
| エンコーダ回転方向 | コンベアを上流から下流に送った際のエンコーダの回転方向(1:正転、 -1:逆転) |
ロボットとビジョンセンサの位置関係に関するパラメータ
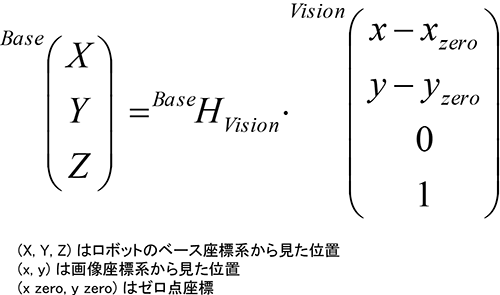
カメラパラメータ、ゼロ点座標とワーク把持基本姿勢が保存されます。
Ver.1.11.*以前とVer.1.12.*以降で、キャリブレーションを行った際に格納されるフォーマットが異なります。
また、Ver.1.11.*以前では、センサトラッキングとビジョントラッキングでも格納されるフォーマットが異なります。
Ver.1.12.*以降で行ったキャリブレーションの結果は、Ver.1.11.*以前のコントローラでは使用できません。
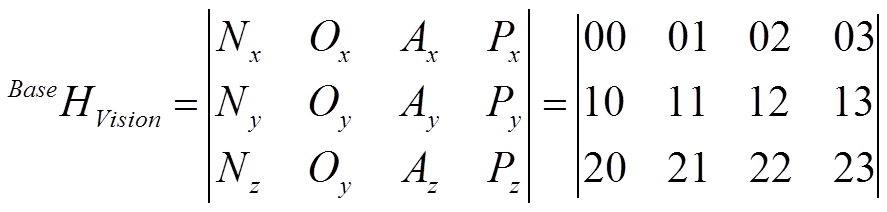
| パラメータの名称 | 内容(Ver.1.11.*以前) | 内容(Ver.1.12.*以降) |
|---|---|---|
| CALDATA値(00) | ビジョンセンサ検出位置X[mm] | 同次変換型のNx |
| CALDATA値(01) | ビジョンセンサ検出位置Y[mm] | 同次変換型のOx |
| CALDATA値(02) | ビジョンセンサ検出位置Z[mm] | 同次変換型のAx |
| CALDATA値(03) | 同次変換型のOx | ビジョンセンサ検出位置X[mm] |
| CALDATA値(10) | 同次変換型のOy | 同次変換型のNy |
| CALDATA値(11) | 同次変換型のOz | 同次変換型のOy |
| CALDATA値(12) | 同次変換型のAx | 同次変換型のAy |
| CALDATA値(13) | 同次変換型のAy | ビジョンセンサ検出位置Y[mm] |
| CALDATA値(20) | 同次変換型のAz | 同次変換型のNz |
| CALDATA値(21) | 0 | 同次変換型のOz |
| CALDATA値(22) | 0 | 同次変換型のAz |
| CALDATA値(23) | 0 | ビジョンセンサ検出位置Z[mm] |
Ver.1.11.*以前
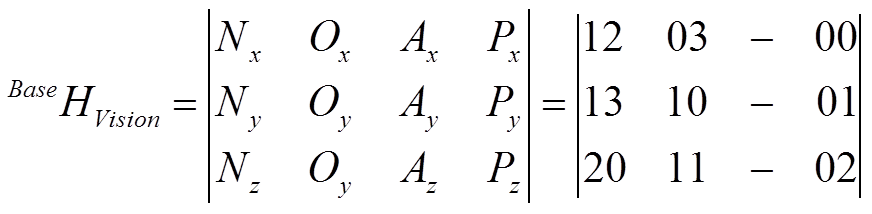
Ver.1.12.*以降
| パラメータの名称 | 内容(Ver.2.0.*以前) | 内容(Ver.2.0.*以降) |
|---|---|---|
| ゼロ点座標X | 0[pixel] | 画像座標上のX[pixel] |
| ゼロ点座標Y | 0[pixel] | 画像座標上のY[pixel] |
| パラメータの名称 | 内容 |
|---|---|
| コンベア基準座標RX | ワーク把持基本姿勢のRX[deg] |
| コンベア基準座標RY | ワーク把持基本姿勢のRY[deg] |
| コンベア基準座標RZ | ワーク把持基本姿勢のRZ[deg] |
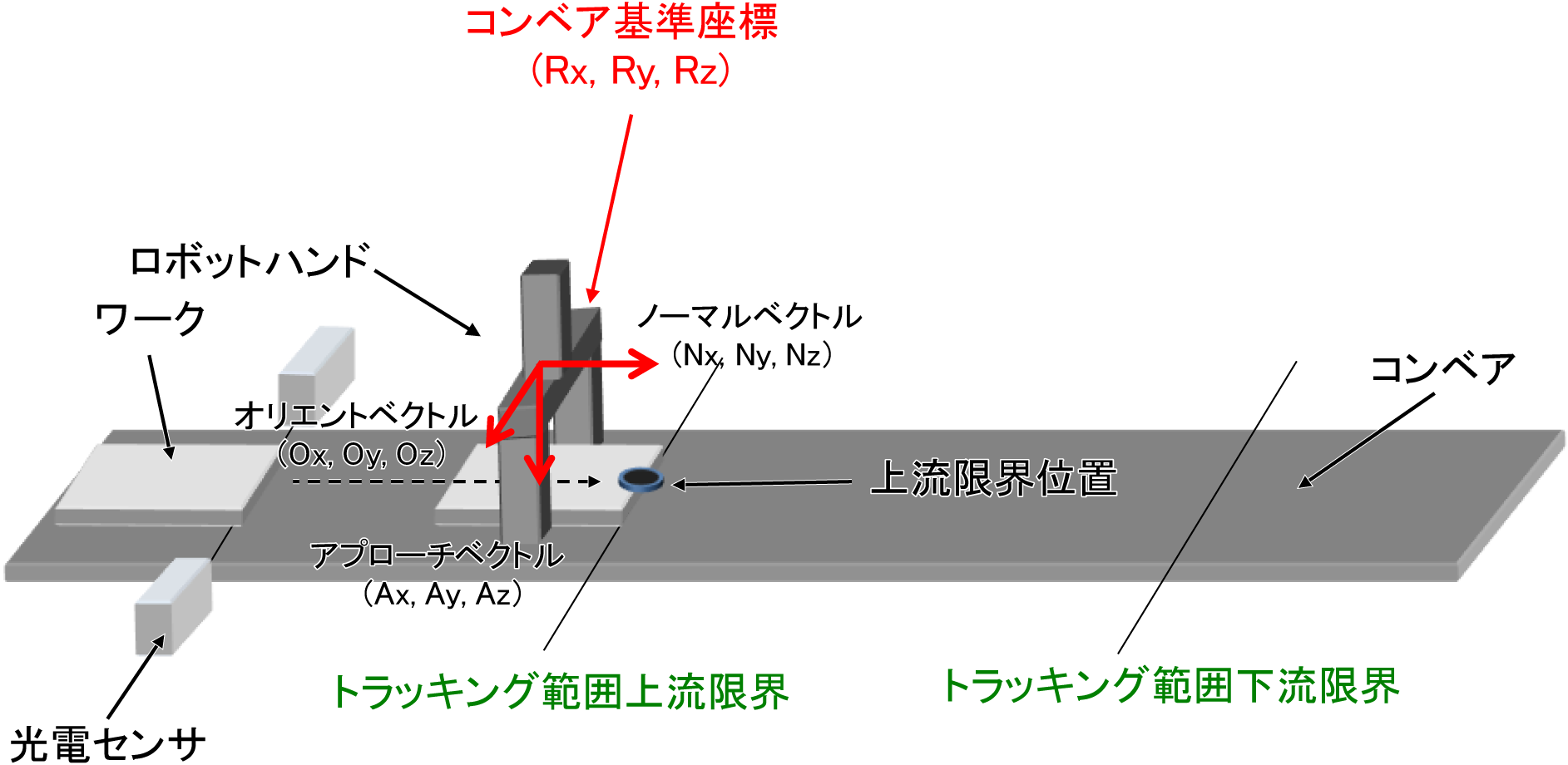
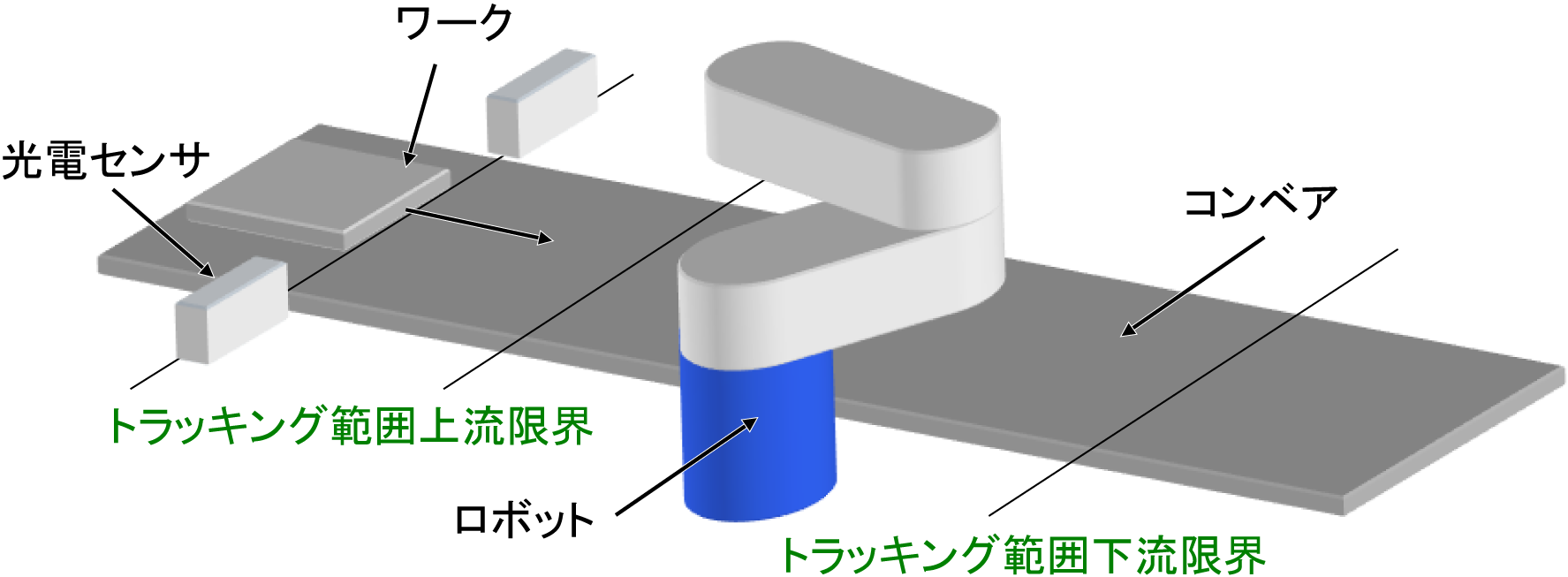
トラッキング範囲に関するパラメータ
| パラメータの名称 | 内容 |
|---|---|
| トラッキング範囲上流限界 | ロボットがコンベア追従動作を開始することのできる上流側の位置[mm] |
| トラッキング範囲下流限界 | ロボットがコンベア追従動作をやめ減速を開始する下流側の位置[mm] |
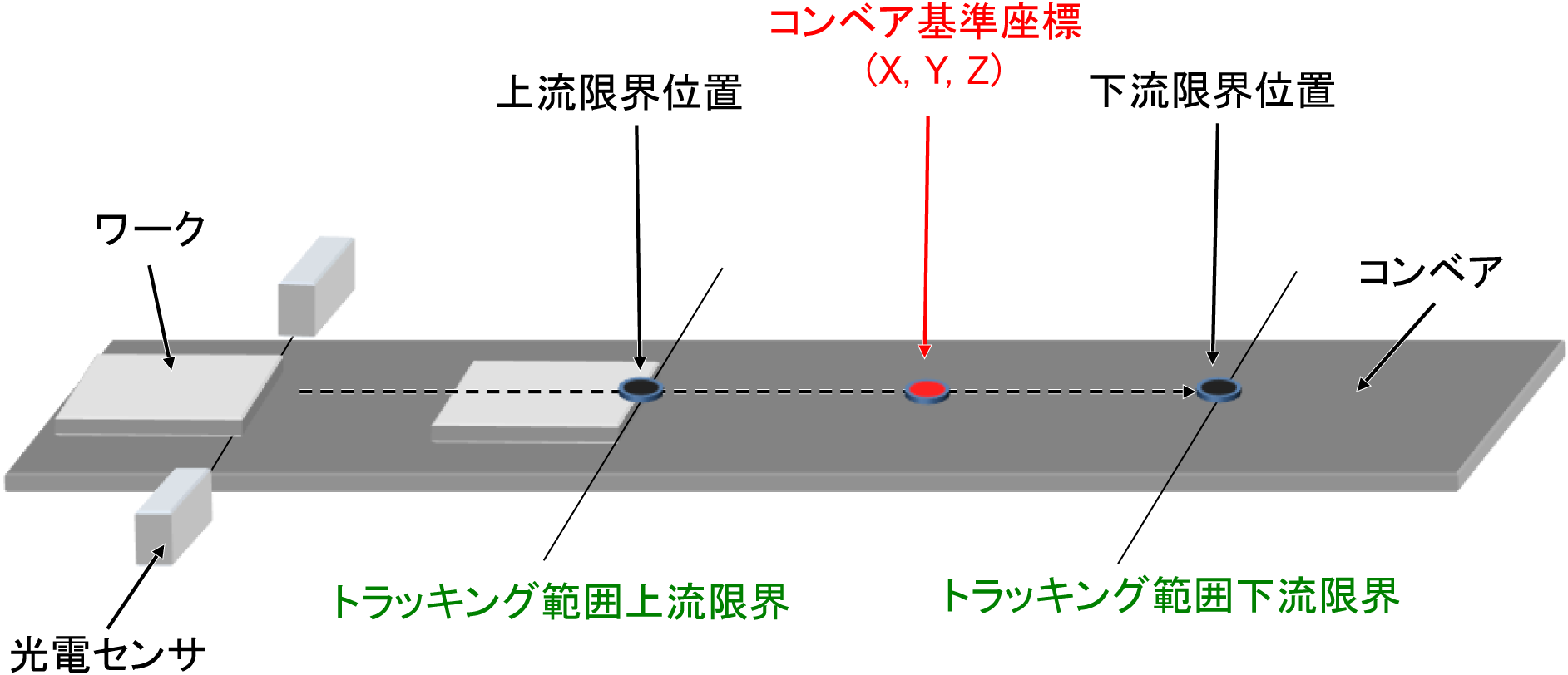
| パラメータの名称 | 内容 |
|---|---|
| コンベア基準座標X | 上流限界位置と下流限界位置の中点位置X[mm] |
| コンベア基準座標Y | 上流限界位置と下流限界位置の中点位置Y[mm] |
| コンベア基準座標Z | 上流限界位置と下流限界位置の中点位置Z[mm] |
ID : 5359
- このページに関連する情報
- コンベアキャリブレーション実施手順
- パラメータの設定