
ID : 5319
ロボット軸範囲の設定方法
ロボット軸の選択はティーチングペンダントもしくは、WINCAPSIIIでできます。方法は以下の通りです。
- ロボット軸に指定しない軸は全て付加軸となります。
- ロボット軸選択を変更するとアームグループとリンク情報の設定が初期化されます。
ティーチングペンダントによる設定
1
操作経路:基本画面 - [F2 アーム] - [F12 保守] - [F10 軸設定] - [F12 ロボット軸範囲設定]を押します。
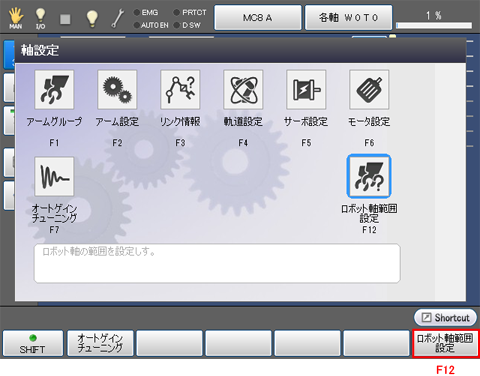
「ロボット軸範囲」画面が表示されます。
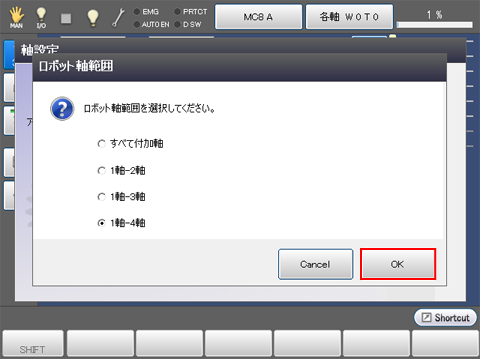
2
ロボット軸に指定する軸を選択し、[OK]を押します。
WINCAPSIIIによる設定
1
操作経路:[プロジェクト] - [軸設定表]を選択します。
「軸設定」画面が表示されます。
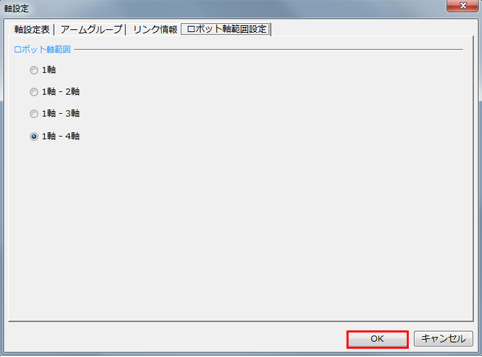
[ロボット軸範囲設定]タブを選択します。
ロボット軸に指定する軸を選択し、[OK]を押します。
2
[通信] - [データ送受信]を選択し、「データ送受信」画面を表示します。
WINCAPSIII - [パラメータ] - [アーム パラメータ]を選択し、コントローラに送信します。
ID : 5319