
ID : 5317
手動操作時の減速割合の設定
手動操作時の減速割合は自動時の10%以下に制限できます。手動操作時の速度を制限する場合に使用します。
詳細については、「ロボット国際安全規格ISO 10218-1:2011」を参照してください。
ここでは、直角座標で構成する3軸メカで、手動操作時のツール先端速度を250mm/s以下に制限する場合を例に説明します。
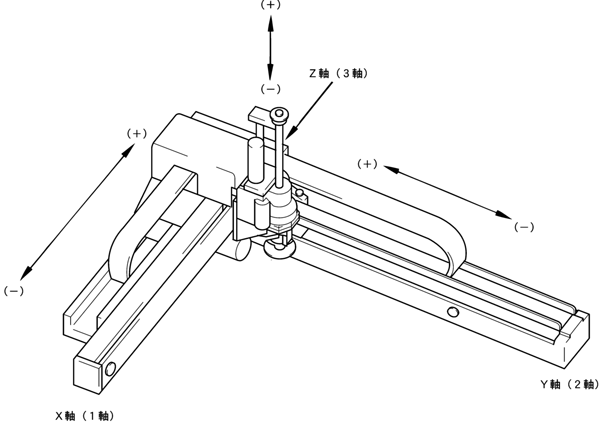
- メカ仕様を確認し、各軸の最大速度を算出します。
- 3軸メカの例
- 最大速度の計算例
- ツール先端の合成最大速度を計算します。
- 3軸メカの合成最大速度の算出例
- 手動操作時の減速割合を計算します。
- 3軸メカで、ツール先端を250[mm/s]以下にする時の算出例
-
算出結果を、「アーム設定」画面の手動操作時の減速割合に代入します。
詳細については、「アームパラメータの設定」を参照してください。
X軸:最大速度2000mm/s
Y軸:最大速度2000mm/s
Z軸:最大速度1000mm/s
リード換算値:40mm/rev モータ最高回転数3000rpmとすると、


ID : 5317