
ID : 4910
エンコーダIDの設定手順
ロボットコントローラで使用するモータはエンコーダ内に"ID"を記録しており、ロボットコントローラはこれをもとにモータを識別して制御します。エンコーダIDにより、下記のようにロボットと付加軸を区別していますが、付加軸モータは出荷時、ID"1"で出荷されますので、使用する前に付加軸モータ内のIDを正しく設定する必要があります。
エンコーダIDはラベルを貼るなどして識別し、設定を間違えないでください。設定を間違えると予期しない軸が動作することがあり、危険です。
また、動作確認は必ず実施してください。その際には十分に安全を確保してください。
IDが同じモータを接続した状態で通電すると、接続している全てのモータが破損する恐れがあります。モータを接続する前に必ずエンコーダID設定を行なってください。
ロボット、付加軸のエンコーダID
ロボット + 付加軸の場合
IDの"1"~"ロボット軸数"までは、ロボット軸のエンコーダIDになります。
"ロボット軸数 + 1"~"8"が付加軸のエンコーダIDとして認識されます。
(例) 6軸ロボットの場合
"1" ~ "6" : ロボット軸
"7" ~ "8" : 付加軸
(例) 4軸ロボットの場合
"1" ~ "4" : ロボット軸
"5" ~ "8" : 付加軸
MC8コントローラの場合
"1" ~ "8"が付加軸のエンコーダIDとして認識されます。
設定手順
以下に、エンコーダIDの設定手順を示します。
1
コントローラ上部のラベルを確認し、使用する全ての軸のモータとケーブルを接続します。マシンロック状態にし、軸を有効にします。
2
基本画面 - [F2 アーム] - [F12 保守] - [F2 エンコーダ] - [F8 エンコーダID設定]を押します。

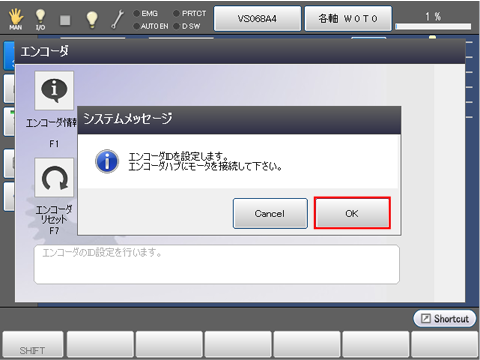
3
エンコーダID設定を行なうかのシステムメッセージが表示されますので、よければ[OK]を押します。
エンコーダID設定が実行されます。
[Cancel]を押すと、エンコーダID設定は実行されません。
4
エンコーダID設定が完了すると、以下のシステムメッセージが表示されます。

[OK]を押すと、「エンコーダ」画面に戻ります。
5
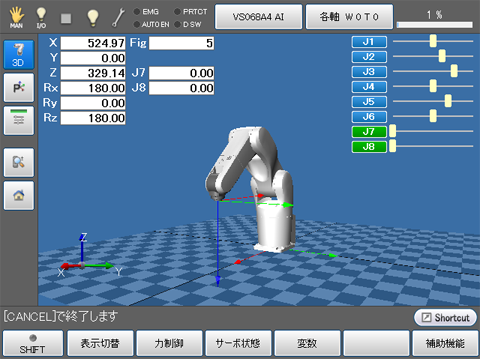
エンコーダIDの設定確認をします。
確認したい軸のブレーキを解除した状態で、モータに外力を加えて動かしてください。ティーチングペンダントの「ロボットの現在位置情報」画面にて、確認したい軸が変化することを確認してください。
操作経路: 基本画面-[F2 アーム]
ID : 4910