
ID : 4834
ロボットの設置方法
1
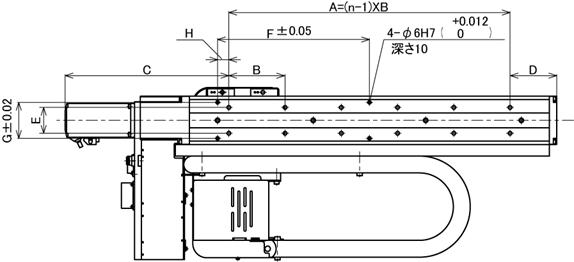
設置台のロボット固定位置に下図の寸法に従って、タップ穴を(2×n)ヶ所開けてください。
| X軸ストローク | 450mm | 760mm | 1060mm | |
|---|---|---|---|---|
| 図内寸法 (mm) |
A | 500 | 900 | 1200 |
| B | 100 | 150 | 150 | |
| C | 291 | 285 | 285 | |
| D | 58 | 55 | 55 | |
| E | 46 | 50 | 50 | |
| F | 270 | 450 | 600 | |
| G | 64 | 80 | 80 | |
| H | 20 | 0 | 0 | |
| n(個) | 6 | 7 | 9 | |
| 取付用 六角穴付ボルト |
M6x18 | M8x20 | M8x20 | |
| 締め付けトルク | 14.7±2N·m |
35.3±7N·m | 35.3±7N·m | |
保守作業時等にロボット本体を脱着した場合、脱着による位置ずれ分だけティーチングの修正が必要になります。
2
「ロボットの運搬方法」に従って、固定位置に仮止めしてください。
3
六角穴付きボルトを使い、指定の締め付けトルクで締め付けてください。
4
X軸のカバーを取付けてください。
このとき、(2×n)ヶ所すべてを締め付けてください。すべてのボルトを締め付けていないとロボットがサーボ系の発振を起こす原因となります。ロボット取付が原因によるトラブルの対策および保証は、応じかねますので取付部の設計の際は特にご注意ください。
ID : 4834