
ID : 4628
天吊り設置(HMS)の例
基本的な作業手順を以下に示します。この作業手順を参考にして、ロボット本体の運搬・設置作業を進めてください。
- ロボット本体質量が約56 kg(約124 lb)であるため、吊り上げ荷重0.2トン以上のクレーンおよびフォークリフトを準備してください。
- 天吊り設置作業は、玉掛け、クレーン運転およびフォークリフト運転の資格を取得している作業者を含む2名以上で行なってください。
- 安全靴・ヘルメット・安全めがね・手袋を必ず着用してください。
1
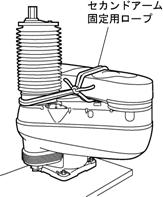
ロボット本体は開梱すると下図のようになっています。ロボットのセカンドアームが回転しないように固定されていることを確認してください。
セカンドアーム固定ロープは、天吊り設置作業が終了するまで取外さないでください。(ロボットアームの自重旋回による危険を防止するため)
<HMS>
2
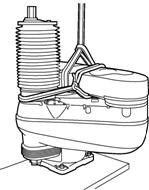
ベルトスリングをファースアーム部に1周回して、片方のアイ部を通してください。
3
ベルトスリングのアイ部をクレーンのフックにかけます。

4
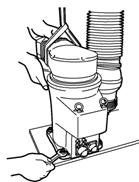
固定用ボルトを外し、パレットからロボット本体を外します。
固定用ボルトを外すときは、ロボットが転倒しないように作業者の1人が支えてください。
5
ロボットの姿勢を保持しながらゆっくりとクレーンを上昇させてください。
特に足元に作業上支障がないよう事前に確認してください。

6
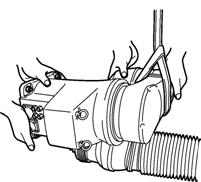
ロボットを反転させることのできる所まで上昇させたらクレーンの上昇を止め、作業者2人でロボットを反転させてください。
7
ロボットが反転した姿勢を作業者2人が保ちながら、クレーンをゆっくり上昇させ、ロボットベース面と取付け面を合わせ、取付用ボルト4本を挿入して仮止めしてください。
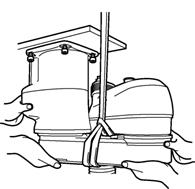
8
「ロボット本体の固定方法」に基づき固定してください。
ボルトの締め付けトルク: 128±20Nm(HMSの場合)
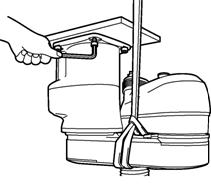
9
取付面へのボルトの固定が完了したら、ベルトスリングをフックから外し、セカンドアーム固定ロープを取外してください。
ロボット本体を取り外すときは、セカンドアームが回転しないように、ロープで固定する処置を行なってください。
ID : 4628