
ID : 4629
ロボット本体の固定方法
1
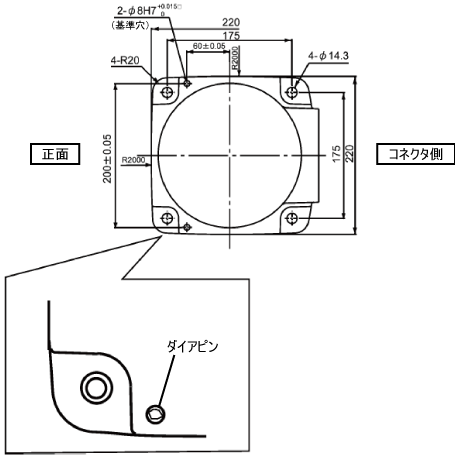
下図の寸法に従って、設置台のロボット固定位置にボルト穴4箇所と位置決めピン穴2箇所を穴あけします。
設置台への穴あけ |
HM/HMSシリーズ | |
|---|---|---|
ロボット固定用穴(4箇所) |
M12、深さ20mm以上 | |
位置決めピン用穴(2箇所) |
ダイヤピン用 | φ6H7、深さ12mm以上 |
| めねじ付位置決めピン用 | φ8H7、深さ12mm以上 | |
2
ダイヤピンをダイヤピン用穴[HM/HMS用:φ6H7]に打ち込みます。このとき、ダイヤピンが下図の方向になるように打込んでください。
3
めねじ付位置決めピンを穴[HM/HMS用:φ8H7]に打込みます。
ノックピンの打ち込みは必ず実施してください。保守作業時などのロボット本体の脱着や振動による位置ズレを最小限に押さえることができます。
4
ロボット本体を固定位置に置きます。
5
本体固定ボルト4本と平座金でロボットを固定します。
- 本体固定ボルト:HM/HMS用 M12×35mm(強度区分12.9)
- 締め付けトルク:HM/HMS用 128±20Nm
(HM/HMS) |
ID : 4629